DeepSeek在科研检索中的应用
本文基于B站博主「糖果果的未来要发光」分享的教程,对秘塔AI工具在科研检索中的应用进行了实操验证。以机器人关节柔性建模为例,展示了秘塔AI的工作流程:输入关键词后AI自动拆解问题并检索200多篇文献,生成含核心观点的Markdown格式内容,可转换为思维导图。此外,AI还能推荐相关博士论文并提供原文链接。案例证明秘塔AI具备深度检索、信息整合和学术辅助能力,为科研工作提供了高效支持。
注:本文基于对 B 站博主「糖果果的未来要发光」分享的教程《AI 写论文避坑指南!不惧查重|全网最全 DeepSeek 科研应用:手把手教你高效科研!》的学习,对秘塔 AI 工具进行了实操验证并完成内容撰写。在此特别致谢「糖果果的未来要发光」的经验分享!
原视频链接:AI写论文避坑指南!不惧查重|全网最全DeepSeek科研应用:手把手教你高效科研!_哔哩哔哩_bilibili
一、输入检索关键词
经实际搜索测试确认,秘塔 AI可满足于科研检索的使用,因此本文将以秘塔AI为例进行分享。
秘塔AI官方网站:秘塔AI搜索
这里提供一个机器人技术检索案例,需要研究机器人关节柔性建模:
1、输入梳理机器人关节柔性建模的学术方法及最优技术路线;
2、点击“长思考”功能;
3、点击研究”按钮;
4、点击确认,AI开始独立思考。

其工作流程涵盖问题拆解、信息检索及结果总结。作为AI Agent,它具备规划与问题拆解能力,并能开展深度检索。等待数分钟后,它已读取200多篇引用的链接文章,且点击即可查看信息来源。观察右侧内容,每项均呈现其规划与思考过程—它将每个问题拆解后最终给出答案,内容详尽且全面。

二、获取检索内容的核心观点
进一步追问,例如“生成Markdown格式的思维导图”。秘塔AI会基于前述内容自动筛选,保留文献中关于建模方法、控制策略、实验验证及前沿技术的核心观点:
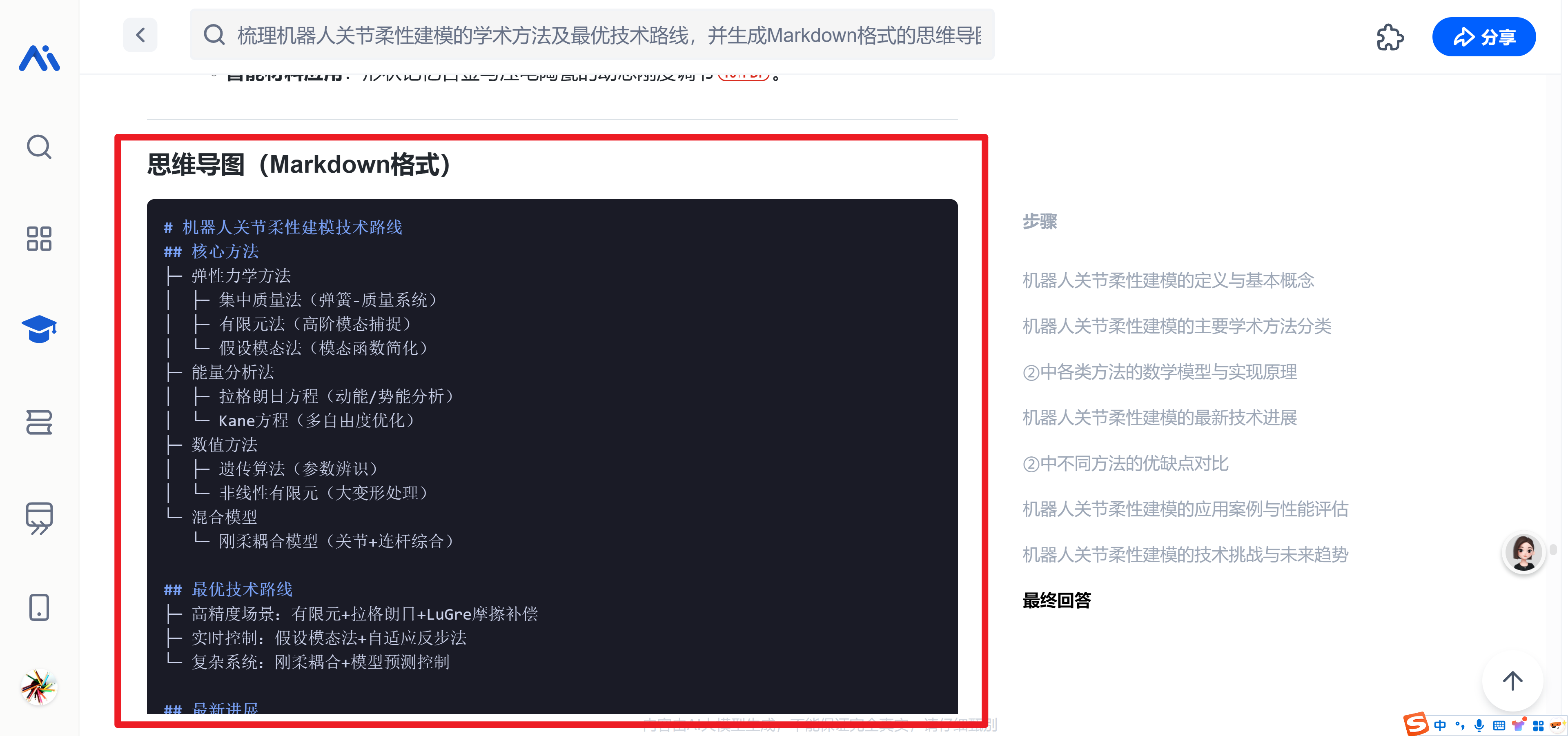
三、将核心观点转换为思维导图
将Markdown格式内容保存为.txt文本文件,同时另存为.md格式,随后导入Xmind绘制思维导图,以此直观呈现文献的技术路线与研究逻辑:

四、其他
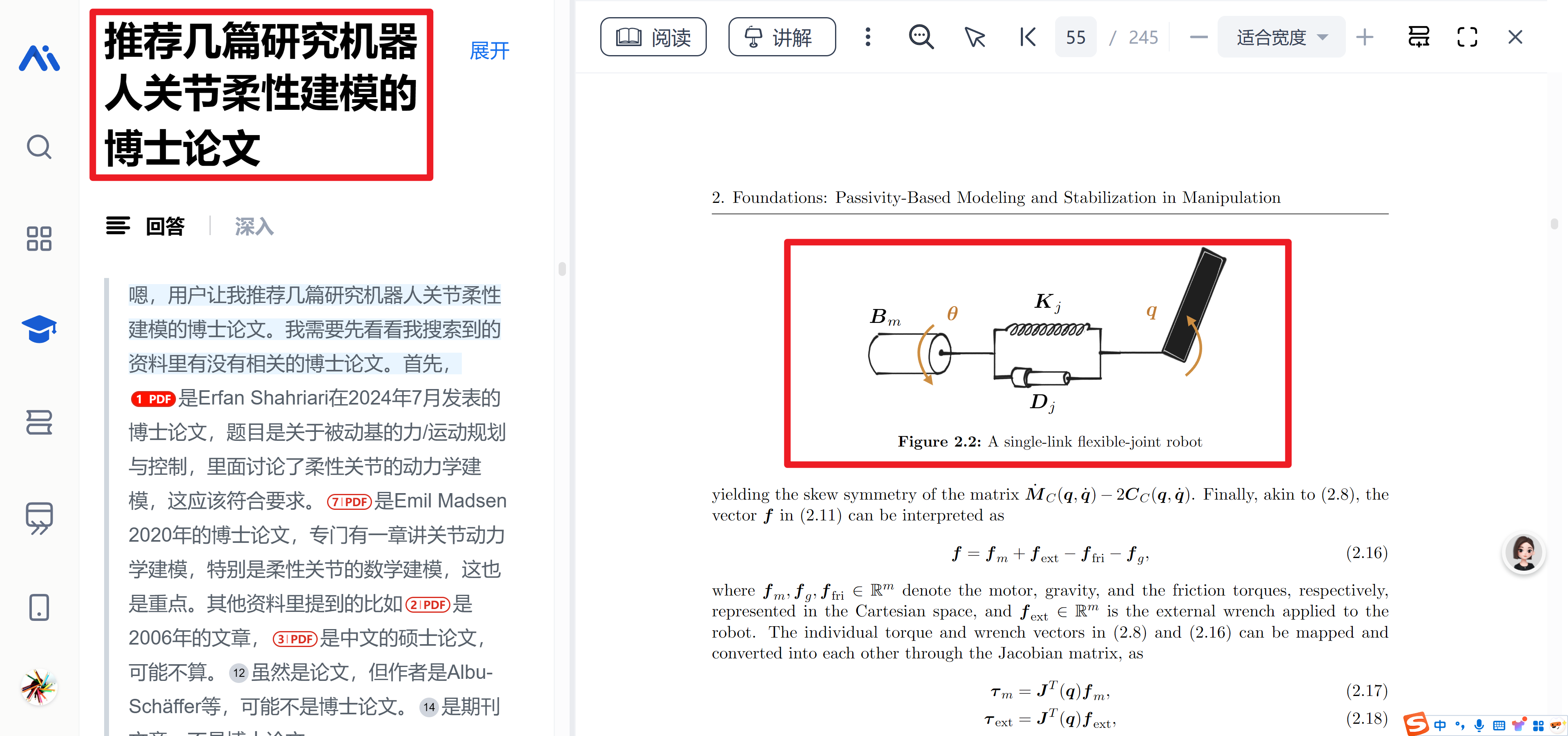
还可进一步追问,例如“推荐几篇研究机器人关节柔性建模的博士论文”。等待一分钟后,它已提供3篇博士论文,点击即可查看PDF原文。观察右侧内容,其中一篇为Technische Universität München(慕尼黑工业大学)Erfan Shahriari的博士论文《Passivity-Based Force/Motion Planning and Control for Tactile Manipulation》,该论文第55页确实有对机器人关节柔性的分析:

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐


 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)