探索基于STM32F1的 BLDC 与 PMSM 电机驱动之旅
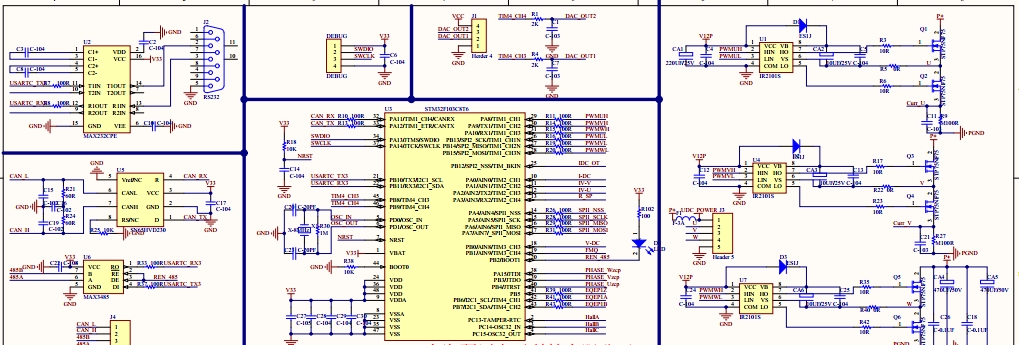
BLDC无刷直流电机和PMSM永磁同步电机 基于stm32F1的有传感器和无传感驱动 直流无刷电机有传感器和无传感驱动程序, 无传感的实现是基于反电动势过零点实现的,有传感是霍尔实现。 永磁同步电机有感无感程序,有感为霍尔FOC和编码器方式, 无感为换滑模观测器方式。 有原理图和文档 可供学习参考 程序有详细注释。
在电机控制的奇妙世界里,BLDC 无刷直流电机和 PMSM 永磁同步电机无疑是两颗璀璨的明星。今天咱就来唠唠基于 STM32F1 平台,对这两种电机进行有传感器和无传感器驱动的那些事儿。
BLDC 无刷直流电机驱动
有传感器驱动(霍尔实现)
BLDC 电机的有传感器驱动中,霍尔传感器起着关键作用。霍尔传感器能够实时检测电机转子的位置,从而为电机的换相提供准确依据。
BLDC无刷直流电机和PMSM永磁同步电机 基于stm32F1的有传感器和无传感驱动 直流无刷电机有传感器和无传感驱动程序, 无传感的实现是基于反电动势过零点实现的,有传感是霍尔实现。 永磁同步电机有感无感程序,有感为霍尔FOC和编码器方式, 无感为换滑模观测器方式。 有原理图和文档 可供学习参考 程序有详细注释。
来看一段简单的霍尔传感器读取代码示例(基于 STM32F1):
// 定义霍尔传感器引脚
#define HALL_A_PIN GPIO_Pin_0
#define HALL_B_PIN GPIO_Pin_1
#define HALL_C_PIN GPIO_Pin_2
// 初始化霍尔传感器引脚
void HallSensor_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStruct.GPIO_Pin = HALL_A_PIN | HALL_B_PIN | HALL_C_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 读取霍尔传感器状态
uint8_t ReadHallSensor(void) {
uint8_t hall_state = 0;
if (GPIO_ReadInputDataBit(GPIOA, HALL_A_PIN)) hall_state |= 0x01;
if (GPIO_ReadInputDataBit(GPIOA, HALL_B_PIN)) hall_state |= 0x02;
if (GPIO_ReadInputDataBit(GPIOA, HALL_C_PIN)) hall_state |= 0x04;
return hall_state;
}代码分析:首先通过 HallSensor_Init 函数初始化霍尔传感器对应的 GPIO 引脚,设置为浮空输入模式,这样能更好地读取外部信号。ReadHallSensor 函数则负责读取当前霍尔传感器的状态,并将其组合成一个 8 位的状态值返回。这个状态值可以用于后续的电机换相逻辑判断。
无传感器驱动(基于反电动势过零点实现)
无传感器驱动省去了额外的传感器,降低了成本和复杂度,但实现起来也更具挑战性。其核心原理是基于反电动势过零点来判断电机转子位置。
// 定义反电动势采样引脚
#define BACK_EMF_PIN GPIO_Pin_3
// 初始化反电动势采样引脚
void BackEMF_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStruct.GPIO_Pin = BACK_EMF_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 读取反电动势值
uint16_t ReadBackEMF(void) {
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}代码分析:BackEMF_Init 函数将反电动势采样引脚初始化为模拟输入模式,以便采集模拟的反电动势信号。ReadBackEMF 函数则利用 STM32F1 的 ADC 功能来读取反电动势的值。通过检测反电动势过零点,我们就能确定电机的换相时刻,从而实现无传感器驱动。
PMSM 永磁同步电机驱动
有传感器驱动(霍尔 FOC 和编码器方式)
对于 PMSM 电机的有传感器驱动,霍尔 FOC(磁场定向控制)和编码器是常用的两种方式。霍尔 FOC 通过霍尔传感器获取转子位置信息,结合 FOC 算法实现高性能的电机控制。而编码器则能提供更为精确的位置和速度反馈。
无传感器驱动(滑模观测器方式)
PMSM 的无传感器驱动采用滑模观测器方式,这是一种基于电机数学模型的观测方法。通过构建滑模观测器,可以实时估计电机的转子位置和速度。
虽然这里没有给出 PMSM 相关代码,但大家可以想象,实现过程也是围绕对电机状态的精准检测和控制算法展开。滑模观测器需要对电机的电流、电压等信号进行采集和处理,通过复杂的算法来估算转子位置和速度。
总结
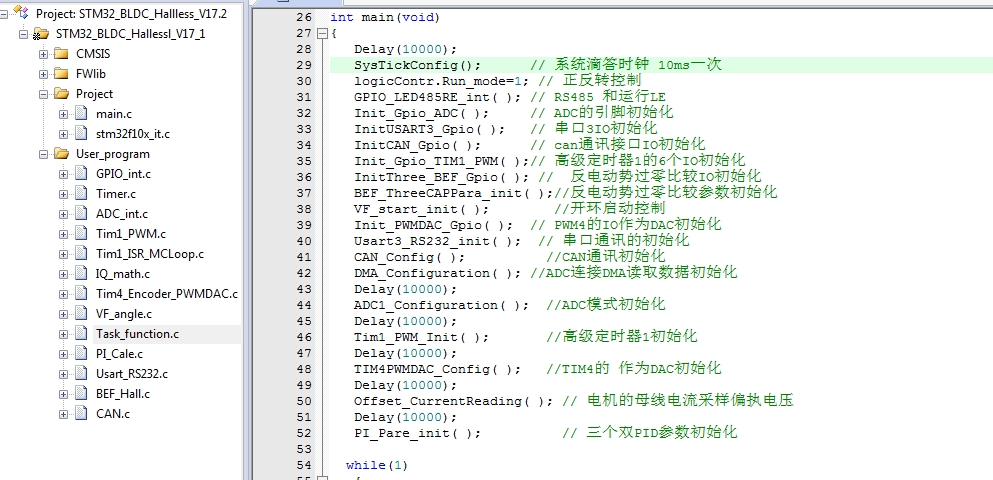
本次探索基于 STM32F1 的 BLDC 和 PMSM 电机驱动,从有传感器到无传感器驱动,都有不同的实现方式。并且提供了原理图和文档,程序也有详细注释,非常适合大家深入学习参考。无论是为了降低成本的无传感器方案,还是追求高精度控制的有传感器方案,都为电机控制的应用场景提供了丰富选择。希望大家能从这些知识和代码示例中,开启自己在电机控制领域的探索之旅。

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)