Alpha-Beta-Zero to dq0, dq0 to Alpha-Beta-Zero MATLAB_help文档DeepSeek翻译
Alpha-Beta-Zero 到 dq0,dq0 到 Alpha-Beta-Zero
执行从 αβ0 静止坐标系到 dq0 旋转坐标系的变换或其逆变换
库
Simscape / Electrical / Specialized Power Systems / Control

描述
Alpha-Beta-Zero 到 dq0 模块执行从固定坐标系中的 αβ0 Clarke 分量到旋转坐标系中的 dq0 Park 分量的变换。
dq0 到 Alpha-Beta-Zero 模块执行从旋转坐标系中的 dq0 Park 分量到固定坐标系中的 αβ0 Clarke 分量的变换。
该模块支持文献中使用的两种 Park 变换约定:
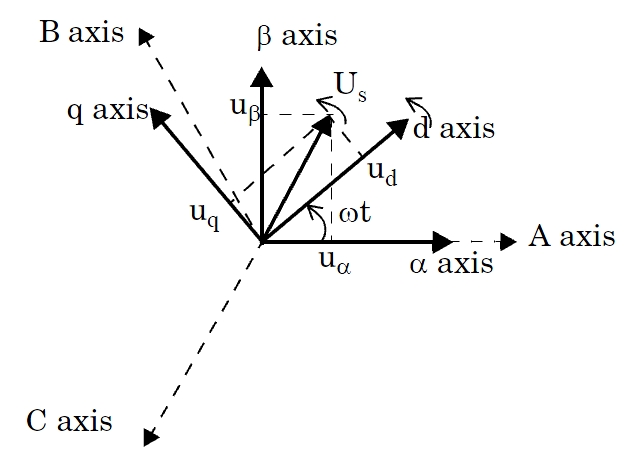
- 旋转坐标系在 t = 0 时与 A 轴对齐。这种类型的 Park 变换也称为基于余弦的 Park 变换。
- 旋转坐标系滞后 A 轴 90 度。这种类型的 Park 变换也称为基于正弦的 Park 变换。在 Simscape™ Electrical™ Specialized Power Systems 的三相同步和异步电机模型中使用它。
已知旋转坐标系的位置由 ω·t 给出(其中 ω 表示坐标系旋转速度),αβ0 到 dq0 变换对空间矢量 Us = uα + j· uβ 执行 −(ω·t) 旋转。零序分量保持不变。
根据 t = 0 时的坐标系对齐方式,dq0 分量由 αβ0 分量推导如下:
当旋转坐标系与 A 轴对齐时,得到以下关系:
$$
\begin{bmatrix}
u_d \
u_q \
u_0
\end{bmatrix}
\begin{bmatrix}
\cos(\omega t) & \sin(\omega t) & 0 \
-\sin(\omega t) & \cos(\omega t) & 0 \
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
u_\alpha \
u_\beta \
u_0
\end{bmatrix}
$$
逆变换由下式给出:
$$
\begin{bmatrix}
u_\alpha \
u_\beta \
u_0
\end{bmatrix}
\begin{bmatrix}
\cos(\omega t) & -\sin(\omega t) & 0 \
\sin(\omega t) & \cos(\omega t) & 0 \
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
u_d \
u_q \
u_0
\end{bmatrix}
$$
当旋转坐标系滞后 A 轴 90 度时,得到以下关系:
$$
\begin{bmatrix}
u_d \
u_q \
u_0
\end{bmatrix}
\frac{2}{3}
\begin{bmatrix}
\sin(\omega t) & \sin(\omega t - \frac{2\pi}{3}) & \sin(\omega t + \frac{2\pi}{3}) \
\cos(\omega t) & \cos(\omega t - \frac{2\pi}{3}) & \cos(\omega t + \frac{2\pi}{3}) \
\frac{1}{2} & \frac{1}{2} & \frac{1}{2}
\end{bmatrix}
\begin{bmatrix}
u_a \
u_b \
u_c
\end{bmatrix}
$$
逆变换由下式给出:
uα+j⋅uβ=(ud+j⋅uq)⋅ej(ωt−π2) u_\alpha + j \cdot u_\beta = (u_d + j \cdot u_q) \cdot e^{j(\omega t - \frac{\pi}{2})} uα+j⋅uβ=(ud+j⋅uq)⋅ej(ωt−2π)
应用于一组平衡的三相正弦量 ua, ub, uc 的 abc 到 Alpha-Beta-Zero 变换,产生一个空间矢量 Us,其在固定坐标系中的 uα 和 uβ 坐标随时间正弦变化。相反,应用于一组平衡的三相正弦量 ua, ub, uc 的 abc 到 dq0 变换(Park 变换),产生一个空间矢量 Us,其在 dq 旋转坐标系中的 ud 和 uq 坐标保持恒定。
参数
旋转坐标系对齐方式(在 wt=0 时)
选择三相平衡信号的 dq0 分量在 wt = 0 时旋转坐标系的对齐方式:
ua=sin(ωt);ub=sin(ωt−2π3);uc=sin(ωt+2π3) u_a = \sin(\omega t); \quad u_b = \sin(\omega t - \frac{2\pi}{3}); \quad u_c = \sin(\omega t + \frac{2\pi}{3}) ua=sin(ωt);ub=sin(ωt−32π);uc=sin(ωt+32π)
(正序幅值 = 1.0 pu;相角 = 0 度)
当选择 与 A 相轴对齐 时,dq0 分量为 d = 0, q = −1, zero = 0。
当选择 滞后 A 相轴 90 度(默认选项)时,dq0 分量为 d = 1, q = 0, zero = 0。
输入和输出
αβ0
向量化的 αβ0 信号。
dq0
向量化的 dq0 信号。
wt
dq 旋转坐标系相对于静止坐标系的角位置,单位为弧度。
示例
power_Transformations 示例展示了执行 Clarke 和 Park 变换的模块的各种用法。
版本历史记录
q0 信号。
wt
dq 旋转坐标系相对于静止坐标系的角位置,单位为弧度。
示例
power_Transformations 示例展示了执行 Clarke 和 Park 变换的模块的各种用法。
版本历史记录
R2013a 中推出

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐
 30
30 0
0- 0



 已为社区贡献92条内容
已为社区贡献92条内容

所有评论(0)