【Gemini深度研究】丘陵地带果园智能水果采摘机器人研究进展:2026年度深度技术与产业分析报告
在全球农业现代化的历史进程中,农业生产的结构性转型正在以前所未有的速度推进。随着全球劳动力老龄化加剧、农村适龄劳动力急剧流失以及农业用工成本的持续攀升,高度依赖人工的农业生产环节正面临着严峻的生存挑战。当前,全球水果种植面积已超过1.2亿公顷,年产量接近9.4亿吨,而水果采摘作为整个农业生产链条中劳动力最为密集、时间窗口最为敏感的环节,其向自动化与智能化转型已成为不可逆转的产业必然趋势1。历史上,




丘陵地带果园智能水果采摘机器人研究进展:2026年度深度技术与产业分析报告
引言与产业宏观背景
在全球农业现代化的历史进程中,农业生产的结构性转型正在以前所未有的速度推进。随着全球劳动力老龄化加剧、农村适龄劳动力急剧流失以及农业用工成本的持续攀升,高度依赖人工的农业生产环节正面临着严峻的生存挑战。当前,全球水果种植面积已超过1.2亿公顷,年产量接近9.4亿吨,而水果采摘作为整个农业生产链条中劳动力最为密集、时间窗口最为敏感的环节,其向自动化与智能化转型已成为不可逆转的产业必然趋势1。历史上,农业机械化的红利主要集中于地势平坦、作物结构单一的大田粮食作物(如小麦、玉米),而高经济附加值的多年生果树(如苹果、柑橘、樱桃、核果类)则大量分布于丘陵与山地区域。以中国为例,丘陵山区耕地面积占据了全国耕地总量的显著比例,其复杂多变的地形、普遍超过15度的陡峭坡度以及碎片化的果园布局,导致传统农业机械在这些区域的作业效率大幅下降30%至50%,且存在极高的侧翻风险2。这种地理与地形的天然屏障,使得丘陵地带果园的综合机械化率长期处于低谷,严重制约了现代农业的全面发展。
进入2026年,得益于人工智能(AI)、边缘计算、三维机器视觉、仿生柔性材料以及多智能体协同算法的爆发式突破,智能水果采摘机器人技术已跨越了早期实验室原型的概念验证阶段,正式迈入复杂非结构化环境下的商业化部署元年4。智能采摘机器人被视为“农业4.0”的核心载体,其不仅需要具备在崎岖坡地上如履平地的强地形适应能力,还必须在枝叶繁茂、光照剧烈变化、果实严重遮挡的极端视觉环境中,实现毫米级的精准识别与无损抓取5。本报告旨在全面梳理并深度剖析2026年丘陵地带果园智能水果采摘机器人在产业经济学、底盘全向调平设计、自主导航与路径规划、遮挡环境下的视觉感知、柔性机械臂与无损末端执行器以及集群协同调度等核心技术领域的最新研究进展与商业应用案例,为学术界与工业界提供前瞻性的战略参考与技术洞察。
采摘机器人的经济可行性与商业化驱动力
智能采摘机器人的研发与推广,其核心驱动力并非单纯的技术演进,而是由极其严苛的产业经济学规律所决定的。在劳动力供给端,由于季节性移民劳工政策的收紧(如美国的H-2A签证项目限制)以及年轻一代对高强度农业体力劳动的抗拒,农场主正面临着前所未有的“用工荒”7。这种劳动力短缺直接导致了巨额的经济损失。数据显示,在加利福尼亚州等核心产区,草莓等浆果的纯采摘人工成本已飙升至每年每英亩43,000美元,而在某些特定采摘季,由于无法及时雇佣到足够的采摘工人,导致高达30%的优质果实腐烂在田间,造成了毁灭性的产能浪费7。
在此背景下,全球水果采摘机器人市场迎来了爆发式增长。据产业数据统计,2026年全球水果采摘机器人市场规模估值约为23.1亿美元,并预计将以18.7%的复合年增长率(CAGR)强势扩张,至2033年将达到76.4亿美元的惊人规模10。在细分市场中,自动采摘机器人占据了62%的绝对主导份额,而苹果采摘应用则因其庞大的种植基数和较高的自动化适配度,占据了42%的市场份额10。从地域分布来看,北美地区凭借庞大的商业化农场规模和对高昂劳动力成本的极度敏感,在2026年以38%的市场份额领跑全球;与此同时,在国家农业现代化政策及巨额农机购置补贴的强力推动下,亚太地区(尤其是中国和日本)正成为全球增速最快的增量市场10。
然而,尽管市场需求极其迫切,但高昂的初始硬件投资(CAPEX)与维护成本依然是阻碍中小型果园大规模普及机器人技术的最大瓶颈12。一台集成高精度深度相机、多自由度机械臂与全向移动底盘的采摘机器人,其采购成本往往远超普通农户的承受能力。为了精准量化机器人的经济可行性,研究人员基于农业生产经济学模型进行了详尽的盈亏平衡分析。以华盛顿州典型的40.5英亩(约16.4公顷)商业化苹果园为例,假设当前机器人原型机能够成功采摘60%的果实(剩余复杂区域由人工辅助完成),果园主在保持与全人工采摘相同利润率的前提下,所能承受的机器人最大初始投资额约为79,000美元13。如果将其折算为年度摊销成本,农场主每年每英亩可在机器人设备上投入248.42美元的预算8。更为关键的是,这一经济阈值对人工薪酬的通胀极为敏感:人工工资每上涨25%,机器人的盈亏平衡投资上限就会翻倍13。这一经济学杠杆效应深刻揭示了,随着法定最低工资的逐年上调,采摘机器人的投资回报期(ROI)正在被急剧压缩。
为了打破重资产投入的商业化僵局,农业科技初创企业在2026年普遍采用了一种更具弹性的“机器人即服务”(Robotics-as-a-Service, RaaS)商业模式7。在RaaS模式下,果农无需一次性购买昂贵的硬件设备,而是按照机器人的实际采摘重量、作业面积或作业时间支付服务费。这种模式不仅将果园的资本支出(CAPEX)转化为更为灵活的运营支出(OPEX),还有效规避了设备折旧、系统维护以及软硬件迭代的风险7。此外,RaaS模式允许设备供应商根据不同维度的水果成熟时间表,在不同纬度和气候区之间进行设备车队的跨区域流转调度,从而极大地提高了高价值机器人的全年利用率。
|
经济学与市场核心指标 |
2026年基准数据 / 预测值 |
产业趋势与影响因素分析 |
|
全球市场规模估值 |
23.1亿美元 |
预计至2033年将达76.4亿美元(18.7% CAGR) |
|
加州草莓单亩采摘成本 |
约 43,000美元/年 |
受H-2A签证限制与劳动力老龄化影响,持续攀升 |
|
机器人盈亏平衡投资额 |
79,000美元 (适用40.5英亩果园) |
基于60%机器人采摘率,人工工资上涨25%则阈值翻倍 |
|
年度可承受折旧支出 |
248.42美元/英亩/年 |
与机器人的采摘节拍、损伤率呈高度负相关 |
|
主流商业落地模式 |
机器人即服务 (RaaS) |
降低农场主初始资金门槛,提升设备跨产季调度利用率 |
复杂地形下的底盘工程学与全向调平技术
作为农业机器人系统的物理基石,移动底盘的结构设计直接决定了设备在非结构化丘陵地形中的通过性、牵引效率以及整机的作业稳定性14。丘陵地带果园不仅坡度起伏剧烈(常见5°至30°不等的陡坡),且普遍存在垄沟交错、地面湿滑、杂草丛生以及土壤承载力分布不均等极端路况3。当安装于底盘之上的机械臂在进行大幅度伸展和抓取动作时,整机的重心会发生动态偏移,如果底盘不具备强大的抗倾覆能力和姿态自适应补偿能力,将直接导致视觉传感器的标定失效、机械臂逆运动学解算越界,甚至引发严重的翻车事故16。
轮式与履带式驱动构型的地面力学博弈
在底盘驱动构型的选择上,学术界与工程界针对轮式(Wheeled)与履带式(Tracked)系统在不同土壤湿度与坡度下的力学表现进行了大规模的实证对比研究。测试数据表明,这两种构型在不同环境阈值下展现出了截然相反的性能优势。在土壤相对干燥(含水率目标值10%,实测9.8%-10.1%)且坡度平缓的果园中,轮式机器人凭借其较高的地表摩擦力和出色的机动性,表现出了最优的行驶效率,其平均行驶速度可达0.45 m/s,滑移率(Slip Rate)控制在5%以内,且路径跟踪偏差小于±3 cm17。
然而,在气候多变的山地果园中,降雨或灌溉后的土壤往往呈现出高粘性与低承载力的特征。当土壤含水率上升至中等湿润状态(实测19.5%-20.2%)时,轮式底盘的性能开始急剧衰减,由于土壤结构的松散导致抓地力丧失,轮式机器人的平均速度下降至0.40 m/s,滑移率激增至8%,路径偏差扩大至6 cm,迫使导航系统频繁介入进行转向修正,严重消耗了电池能量并降低了作业连贯性17。相比之下,履带式底盘在湿滑与陡峭地形中展现出了压倒性的优势。履带系统能够将整车重量均匀分散在巨大的接地面积上,极大地降低了对土壤的压强,有效防止了机器人在泥泞路面(含水率>35%)的沉陷17。在中等湿润条件下,履带式机器人的滑移率仅为2.5%,路径偏差被严格控制在±2.5 cm以内,即使在横向坡度上行驶,其宽大的履带也能凭借极强的抗侧滑能力抵抗重力引起的横向漂移17。基于上述动力学特性,2026年的前沿研究提出了一种模块化的轮履复合驱动底盘设计,通过在15%-25%的土壤湿度临界窗口内进行驱动模式的动态切换,使采摘机器人在复杂地形中的整体运行效率提升了22%至35%17。
智能全向调平系统与自适应滑模控制
为了在高达25°的坡面上依然保持采摘机械臂与光学传感器的绝对水平,全向自动调平技术已成为丘陵果园机器人的核心标配。传统的刚性底盘由于缺乏自由度,在面对凹凸不平的地面时会产生剧烈的车身倾斜;而早期的液压调平系统则受限于响应延迟和管路泄漏风险,难以满足高频动态调整的需求14。
最新的工程突破体现在基于“双层车架(Double-layer frame)”结构的履带式农机底盘设计上。该系统摒弃了传统的液压缸,转而采用高精度的伺服电动缸作为核心执行元件20。在控制算法层面,研究人员放弃了面对非线性外部扰动时表现乏力的传统PID控制器,转而构建了先进的自适应滑模控制器(Adaptive Sliding Mode Controller, ASMC)。ASMC能够根据双轴倾角传感器或惯性测量单元(IMU)提供的实时姿态反馈,动态调整滑模面参数,从而以极强的鲁棒性消除地形起伏带来的抖动20。通过Matlab/Simulink与Adams的联合仿真及样机实测表明,搭载ASMC控制器的双层履带底盘能够实现最大25°的纵向调平与20°的横向调平。与传统PID控制相比,ASMC将纵向和横向的调平响应时间分别缩短了1.12秒和0.95秒,调平执行速度在纵向和横向分别提升了1.5倍和1.3倍,同时将剧烈的角加速度分别降低了15.8%和17.1%,确保了上层机械臂在复杂坡地作业时的基座绝对平稳20。
此外,对于搭载高灵敏度多光谱设备或多臂协同系统的高端采摘平台,学术界提出了一种基于3-RRS(Revolute-Revolute-Spherical,即旋转-旋转-球面)并联机构的电动调平平台。该平台利用三个支撑腿构成的并联结构,在保证强大承载刚度的同时,从根本上避免了四点调平中常见的“虚腿”现象22。在控制策略上,该系统以移动平台中心高度恒定为附加约束条件,通过推导机身姿态与调平腿曲柄补偿角之间的解析映射关系进行逆运动学解算。试验结果证实,3-RRS并联调平平台在典型负载下可实现全向自动调平,最大调平时间仅需1.593秒,最大稳态误差被严格压缩在0.62°以内,为果园精密作业设备提供了极致的姿态稳定方案22。
|
底盘与调平系统性能指标 |
轮式底盘测试表现 |
履带式底盘测试表现 |
智能全向调平系统 (ASMC/并联机构) |
|
干燥平地 (湿度10%) |
速度最优(0.45m/s),滑移率极低(5%) |
速度稍逊(0.38m/s),滑移率极低(2%) |
无需频繁触发,仅做微调补偿 |
|
湿滑地形 (湿度20%) |
性能急剧衰减,滑移率上升至8% |
适应性极强,滑移率仅2.5% |
有效抵消横向滑动与车体倾斜 |
|
轨迹跟踪最大偏差 |
高达6 cm (湿滑路面需频繁修正) |
±2.5 cm以内 (抗侧滑能力优异) |
将底盘姿态稳态误差控制在0.62°以内 |
|
调平能力与响应速度 |
传统PID控制:响应慢,角加速度大 |
ASMC控制:纵/横向响应时间减少1.12s/0.95s |
3-RRS结构最大调平耗时仅1.593秒 |
|
极限坡度适应阈值 |
>15°坡度下易丧失牵引力及侧翻 |
强劲抓地力,部分设备可克服高达40°斜坡 |
支持纵向25°、横向20°的大倾角自动补偿 |
复杂冠层环境下的自主导航与局部避障路径规划
在解决了底盘的物理通过性与基座调平问题后,采摘机器人在丘陵果园中面临的下一个重大技术瓶颈是自主导航与空间路径规划。与大田农业不同,果园环境中密集的果树冠层、交错的枝丫以及防鸟网等设施,会对全球导航卫星系统(GNSS)的信号造成严重的遮挡与多径效应,导致传统的基于RTK-GPS的厘米级定位系统在果园内部频频失效14。因此,构建不依赖单一卫星信号的多源异构传感器融合导航架构,成为2026年农业机器人领域的核心研究范式24。
激光雷达(LiDAR)与多传感器数据融合建图
为了在GPS拒止(GPS-denied)环境下实现高精度导航,现代果园机器人普遍采用视觉同步定位与建图(V-SLAM)、高频惯性测量单元(IMU)、轮式里程计以及三维激光雷达(3D LiDAR)的紧耦合融合策略25。其中,3D LiDAR因其主动发射红外激光的特性,彻底摆脱了果园光照剧烈变化(如逆光、树荫暗区)对视觉摄像头造成的致盲影响,成为构建果园拓扑地图的主力传感器23。
在处理海量且杂乱的激光点云数据时,算法的优化至关重要。研究人员通过引入带有噪声的基于密度的空间聚类应用算法(DBSCAN)、K-means聚类以及随机抽样一致性(RANSAC)算法,对原始点云进行高效滤波与特征提取,从而在复杂的背景噪声(如杂草、树叶抖动)中精准剥离出果树主干的几何圆柱体特征23。基于提取出的树干序列,系统能够实时拟合出果园行的中心线作为全局导航路径。在混凝土地面、草地以及密植果园等多种条件下的路测试验中,纯LiDAR引导的履带式机器人在执行复杂的左转和右转机动时,其位置均方根误差(RMSE)均被成功控制在11.4 cm至13.8 cm的极小范围内,充分证明了该融合建图与定位方案的极高可靠性23。
全局覆盖与局部避障的混合路径规划算法
采摘机器人的路径规划通常分为全局覆盖规划与局部动态避障两个层级。在全局规划层面,不仅要求机器人以最短的路径遍历所有的果树行(解决图论中的旅行商问题或车辆路径问题),还必须将丘陵地带的特殊地形约束纳入考量。传统的A*或Dijkstra等启发式搜索算法被进一步优化,通过引入三维数字高程模型(DEM)和特定的代价函数(Cost Function)。这种改进后的代价函数会对陡峭的横向坡度或高能耗的爬坡路线施加极高的惩罚权重,从而迫使规划器输出一条不仅距离短,且能耗最低、翻车风险最小的全局最优安全路径24。
在局部规划层面,果园是一个高度动态的非结构化环境,机器人随时可能遭遇突然伸出的树枝、遗落的农具或是正在移动的果农。为了实现平滑且连续的动态避障,基于优化的定时弹性带(Timed Elastic Band, TEB)算法以及改进的快速探索随机树算法(如CBQ-RRT*、HPS-RRT*)被广泛应用24。这些先进的局部规划器不仅能在毫秒级时间内计算出无碰撞的绕行轨迹,还能将阿克曼转向或履带差速转向的非完整约束(Non-holonomic constraints)直接嵌入到动力学模型中,确保生成的避障曲线符合底盘的实际物理运动能力,避免了传统算法中因路径曲率过大导致机器人频繁急刹或卡死的问题24。
极端遮挡与光照剧变环境下的视觉感知与具身智能
在所有的技术子系统中,视觉感知技术是赋予采摘机器人“眼睛”与“大脑”的灵魂,它直接负责果实的精准识别、成熟度分类、三维空间定位以及最佳采摘点(如分离果梗)的解算25。然而,在自然果园环境中,视觉系统面临着灾难性的干扰:剧烈的自然光照变化(强光过曝、逆光阴影)、密集的枝叶遮挡、果实之间的高度重叠,以及许多水果在未完全成熟时与背景叶片颜色极为相似的“颜色伪装”现象29。传统的基于颜色阈值分割、边缘检测或HOG形态学特征提取的浅层机器视觉算法,在这种高噪音的非结构化环境中鲁棒性极差,其召回率和精确率往往会遭遇断崖式下跌30。
深度学习与轻量化YOLO架构的极致演进
为彻底攻克感知难题,至2026年,基于深度卷积神经网络(CNN)的端到端目标检测框架已完全取代传统视觉算法,尤其是以YOLO(You Only Look Once)系列为代表的单阶段检测器,凭借其在速度与精度上的绝佳平衡,成为了学术界与工程界的绝对主流11。鉴于采摘机器人通常需要在资源受限、功耗受限的边缘计算设备(如NVIDIA Jetson系列)上进行实时推理,模型的高效轻量化设计成为了竞争的焦点32。
通过大量文献分析可以发现,最新的YOLO架构针对果园的特异性痛点进行了深度的定制化改造。例如,旨在解决苹果树冠重度遮挡问题的YOLO-CSB模型(基于YOLO11s架构)。该模型在主干网络中重构了轻量化的CSFC模块,更为核心的是,它开创性地引入了挤压激励注意力机制(SEAM)和双向特征金字塔网络(BiFPN)。BiFPN通过高效的多尺度特征融合,极大地强化了网络对被树叶半遮挡果实轮廓的特征恢复能力。实测表明,YOLO-CSB模型在参数量仅为9.11 M的情况下,实现了高达93.69%的平均精度均值(mAP),且其结合RGB-D深度相机的三维空间定位误差被压缩至X、Y、Z轴均在4 mm左右,展现了恐怖的检测定位精度32。
另一款针对苹果体积测算与产量预估设计的YOLO-WBL网络,则将小波变换(Wavelet Transform)模块(C3K2_WT)嵌入主干网络中以提取更加细腻的频域多尺度特征,并设计了轻量化共享卷积检测头(Detect-SCGN)。这些极限的剪枝与优化策略使得模型大小仅为惊人的3.72 MB(较基线模型缩减了28.87%),在边缘设备上实现了8.7 FPS的实时推理速度,并在高达40%的遮挡率下,将产量预估的平均绝对百分比误差(MAPE)控制在了8%以内33。
针对那些体积微小且与背景高度融合的水果(如无花果、菠萝、套袋蟠桃或早期疏果阶段的青苹果),研究人员开发了诸如Fig-YOLO、DPD-YOLO以及YOLOv8n-CDDSh等专用网络30。以DPD-YOLO为例,该模型在YOLOv8的基础上引入了坐标注意力机制(Coordinate Attention),并将原始检测头替换为带有交叉注意力(Cross-Attention)和自注意力(Self-Attention)机制的RT-DETR头部。同时,利用Focaler-IoU改进损失函数,迫使神经网络在反向传播时将更多的计算权重集中于那些特征极不明显的微小目标区域,从而彻底解决了复杂背景下小目标的漏检问题34。
|
目标检测模型架构 |
核心技术创新点与网络改进 |
关键性能参数与边缘推理表现 |
适用果园场景与优势 |
|
YOLO-CSB (基于 YOLO11s) |
集成CSFC模块、SEAM遮挡注意力机制与BiFPN多尺度特征融合。 |
mAP: 93.69%, 参数量: 9.11 M, 3D空间定位误差: ~4 mm。 |
针对密植苹果园,极大幅度提升了被枝叶重度遮挡果实的召回率与三维定位精度。 |
|
YOLO-WBL (基于 YOLOv11) |
引入小波变换模块(C3K2_WT),设计Detect-SCGN轻量化检测头。 |
mAP@0.5: 87.2%, 模型大小: 3.72 MB, 边缘设备推理: 8.7 FPS。 |
极度轻量化,专为边缘计算设计;支持点云映射,可实现误差<8%的果实产量实时预估。 |
|
DPD-YOLO (基于 YOLOv8) |
引入坐标注意力机制,替换为RT-DETR检测头,采用Focaler-IoU。 |
显著提升了小目标在重叠区域的检测精度(文献未披露具体数值,但大幅超越基线)。 |
针对背景复杂的菠萝、青果等,利用自注意力机制强化与背景颜色高度相似的微小目标提取。 |
|
YOLOv8n-CDDSh |
构建C2f-DWR-DRB架构处理遮挡,引入ShapeIoU损失函数优化长宽比。 |
精度(P): 92.1%, mAP: 91.7%, 大小: 5.73 MB, 边缘推理: 37.20 FPS。 |
专为套袋水果(如套袋蟠桃)设计,在形状差异巨大、极端光照及阴影条件下保持极高精度。 |
主动视觉规划与具身智能的全面觉醒
传统的2D/3D视觉检测往往是被动的,即摄像机固定在机械臂上进行单视角拍摄。然而,面对严重的枝叶物理遮挡,单凭算法的脑补已无法获取准确的三维坐标。为此,2026年的前沿技术开始向“主动视觉(Active Vision)”和“从演示中学习(Learn from Demonstration, LfD)”范式演进。通过采用带有Transformer的动作分块(Action Chunking with Transformer, ACT)算法,机器人能够模仿人类果农的观察习惯,主动规划摄像机的6个自由度(6-DoF)运动轨迹,驱使机械臂携带RGB-D相机绕过遮挡树叶,从最佳视角“窥探”隐藏的果实,这从物理层面上极大提升了复杂冠层中的果实发现率25。
更为革命性的是“具身智能(Embodied Intelligence)”以及农业大模型(VLA模型)在采摘系统中的深度应用37。基于大参数量的生成式AI模型,采摘机器人不再仅仅输出带有置信度的检测框,而是具备了高维度的语义推理与决策能力。在一项基于“感知-推理-执行”机制的荔枝采摘研究中,生成式AI能够智能评估荔枝果穗的遮挡状态与成熟度分布。当AI推理出果枝无遮挡时,系统会直接对分割区域应用骨架细化算法提取中心点进行快速剪切;而当AI识别到主果枝被树叶严重包裹时,则会智能切换策略,利用最大连通域提取算法进行复杂的避障抓取决策37。此外,如AgroGPT等专用的多模态农业大语言模型,甚至能将环境天气、土壤数据与实时视觉特征结合,帮助机器人进行复杂的任务重规划——例如判断某颗果实虽已成熟,但其空间位姿极易导致机械臂与主干发生刚性碰撞,从而主动决策放弃该目标以保证整机安全与作业节拍40。
柔性机械臂轨迹规划与无损末端执行器控制
在视觉感知系统成功锁定目标并解算出三维空间坐标后,系统的核心挑战随即转移至机械臂的运动轨迹规划与末端执行器(End-effector)的物理交互阶段。水果属于典型的生物粘弹性体,其对机械压力的损伤阈值极其严苛且差异巨大。例如,硬质的猕猴桃可承受高达180 N的压力而不变形,而中等硬度的苹果其损伤临界点在15 N至40 N之间,对于娇嫩的草莓而言,一旦接触力超过2 N至4 N,就会导致表皮破损和细胞组织液渗出,使果实彻底丧失商品价值1。因此,如何在狭小复杂的枝丫间隙中规划出一条无碰撞的机械臂轨迹,并以恰到好处的力度将果实采下,是实现“非破坏性(Non-destructive)”采摘的终极考验。
刚柔耦合末端执行器与仿生材料的突破
早期的刚性两指或三指机械夹爪由于缺乏顺应性,极易刺破果皮。为了适应形状各异的水果,2026年的主流末端执行器大量采用了具有高自由度的软体机器人技术(Soft Robotics),如集成形状记忆合金(SMA)、电活性聚合物(EAP)或食品级硅胶的自适应夹爪42。其中,基于FinRay效应的仿生鳍状结构表现出了优异的包覆性能。当这种仿生手指的基部受到外力挤压时,其尖端会自动向内弯曲,完美贴合柑橘、芒果等不对称水果的表面轮廓,且无需为每个指关节配备独立的伺服电机,极大降低了控制复杂度与设备重量42。
对于必须切断坚韧果梗(Peduncle)的作物,如甜椒或成串的葡萄,工程师们设计了高度集成的多功能末端执行器。例如,一款针对甜椒设计的执行器包含了伺服电动的双指平行夹持模块与摆动剪切模块,其手指内侧密布了高灵敏度的触觉传感器阵列。在抓取时,触觉阵列能够实时感知果梗的精确位置,并判断夹爪是否发生滑动。只有当控制算法确认末端执行器已完美垂直于果梗切线方向且握持稳定时,剪切刀片才会击发,从而在15秒内完成一次完美的无损采摘44。
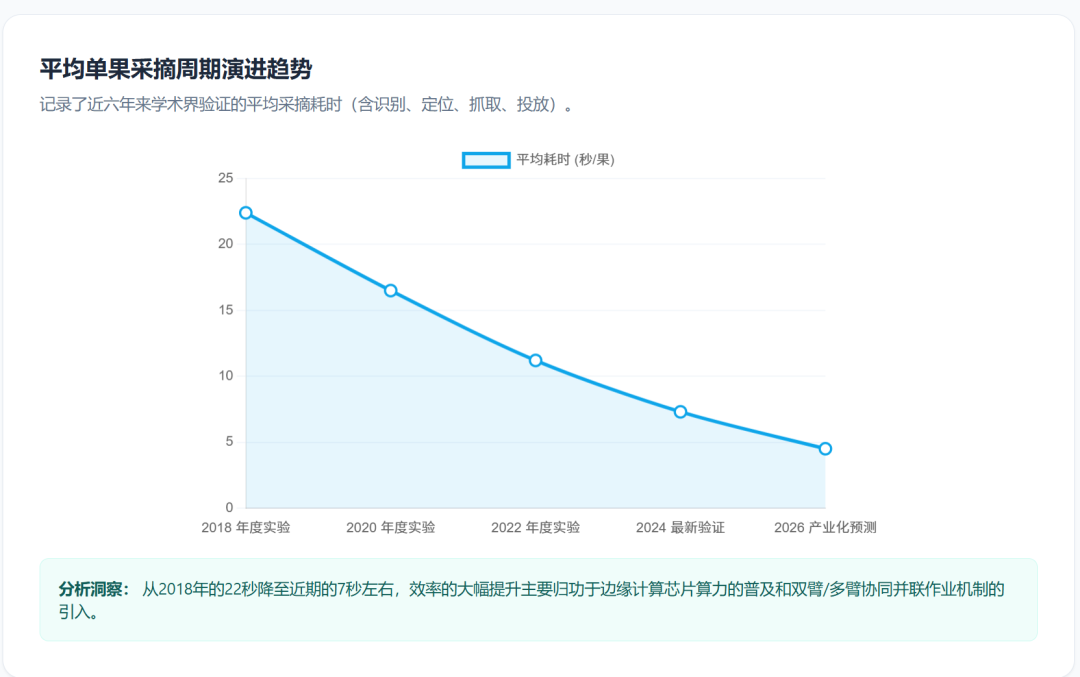
更为激进的柔性设计体现在华盛顿州立大学(WSU)研发的一款充气式软体机械臂上。该系统完全摒弃了沉重的金属关节,采用长度为2英尺(约60厘米)的耐用柔性织物制成。在执行采摘时,机械臂通过充气向目标苹果伸展并进行包裹抓取,一旦完成动作便迅速放气回缩。这种设计的最大优势在于其极致的安全性和极低的成本(造价仅约5500美元,整机重量不足50磅)。即使充气机械臂在复杂的果树冠层中不慎撞击到粗壮的枝干,其织物结构也会自然弯曲形变,彻底杜绝了折断树枝或损伤果实的可能性。尽管其当前7.3秒/果的单次循环时间仍逊色于熟练工人,但其开拓的超轻量化无损采摘思路为产业带来了巨大的启发46。
变阻抗控制与自适应接触力追踪
为了在刚性机械臂与娇嫩水果之间实现完美的顺应性控制(Compliant Control),控制算法已经从被动的混合力-位置控制(Hybrid Force-Position Control)全面升级为主动阻抗控制(Impedance Control)或导纳控制(Admittance Control)49。传统的力-位置控制在夹爪接触水果的瞬间需要频繁切换控制器,极易引发系统的颤振与延迟,这正是导致果实表面出现机械压痕的元凶49。
相比之下,变阻尼阻抗控制通过将外部接触力实时转化为机械臂的参考位置与速度指令,建立起了抓取力与果实形变之间的动态阻抗模型(通常结合Hertz接触理论与描述生物粘弹性的Burgers模型)50。在一项针对“红富士”苹果(测试损伤临界值为24.33 N)的无损采摘研究中,工程师构建了刚柔耦合多体动力学模型,并运用遗传算法(GA)优化了手指的几何参数以确保受力均匀。在实机采摘过程中,主动阻抗控制器通过实时力反馈调节系统的阻尼系数,将远端指节硅胶(DPRS)的接触力被极为精准地锁定在24 N。这一微小的力量余量既保证了苹果在拉扯过程中不会从夹爪中滑落,又确保了果实内部的最大等效应力远低于细胞屈服极限。整个果实包覆过程仅需1.30秒,接触力控制的平均绝对百分比误差(MAPE)低至5.98%,实现了真正意义上的高可靠性无损采摘51。
双臂协同与运动学防碰撞规划
为了突破单臂机器人作业效率的物理极限,多自由度双臂甚至多臂并行采摘系统正成为大型农业装备的标准配置。在双臂系统中,最大的难点在于工作空间的重叠与机械臂之间的干涉碰撞。研究人员为此设计了基于工作空间划分的深度优先异步协作策略(Asynchronous Moving-Looking-Harvesting Cooperation)49。在该策略下,机器人的视觉系统与双机械臂实现了多线程的并发处理。当左臂正在执行抓取动作时,视觉系统已同步完成右侧区域的果实定位,并引导右臂提前进入预备位姿。通过引入复杂的深度强化学习(DRL)算法与经验回放机制,机械臂能够在高维状态空间中快速学习避障策略。田间试验表明,双臂协同模式不仅将无碰撞采摘成功率提升至91.68%,且相比单臂采摘大幅节省了45.17%至48.38%的作业时间,成功将柑橘等水果的单果采摘周期压缩至5秒以内(甚至达到4.65秒),极大拉近了与人工采摘效率的差距44。
多机集群协同调度与全局效能优化
随着单体机器人的硬件潜能被逐渐榨干,丘陵果园在规模化作业时所面临的效率瓶颈,促使产业界将目光投向了由多台智能体组成的“集群控制农业机器人(Swarm-Controlled Agricultural Robots, SCAR)”系统53。在复杂的果园环境中管理一支由数十台机器人组成的采摘舰队,是一个被定义为“农业多电动机器人任务分配(AMERTA)”的复杂多目标优化数学问题。该问题不仅需要平衡总体完工时间(Makespan)与集群总能耗,还必须将负载导致的爬坡速度衰减、电池容量限制、不同树排的果实密度差异以及狭窄果园通道内的交通拥堵等严苛的现实物理约束纳入考量体系54。
为了破解这一高维难题,集中式与分布式相融合的混合协同控制架构被广泛采用53。在算法求解层面,研究者提出了一种混合层次路径重构算法(HRRA),该算法整合了双阶段初始化方法与特制的路线重构算子,专门针对机器人之间的任务序列进行优化。在海量的模拟与实地测试中,基于HRRA和改进的图论搜索算法(如GKOA)的调度方案,其表现彻底碾压了传统的粒子群优化(PSO)、麻雀搜索算法(SSA)或鲸鱼优化算法(WOA)。数据显示,新的集群调度模型在规避多机路径冲突的同时,将集群的整体协同作业效率暴增了45%53。
在通信与微观协作层面,基于Wi-Fi点对点低延迟通信网络的“主从式(Master-Slave)”协作模式在商业化果园中大放异彩。在这种架构下,采摘机器人(从机)专注于高频次的识别与抓取动作,而大载重的智能转运车(主机)则紧紧跟随其后。采摘机械臂摘下果实后不再需要缓慢转身将果实放置于自身料筐中,而是直接通过流水线机构或传送带将果实投入紧随其后的转运车内。这种流水线式的微观协作不仅有效降低了果实在频繁搬运中的磕碰损伤率,还彻底消除了采摘机器人因满载而被迫中断作业返回集散点的无效时间,实现了机器效能的极致压榨57。
前沿商业化部署与田间实测案例(2025-2026)
上述从核心算法到硬件机构的全面突破,在2025至2026年间促成了数个极具里程碑意义的商业化实地部署案例,标志着采摘机器人已正式具备在恶劣农业环境中替代大规模人工作业的产业化能力。
DailyRobotics(美国加州):定于2026年4月在加利福尼亚州启动商业运营的以色列农业科技初创企业DailyRobotics,其推出的Q2型草莓采摘机器人代表了当前浆果收获自动化的最高水平。针对加州广泛采用的宽幅草莓种植床(约0.67至1.4米宽),Q2采用纯电驱动底盘,搭载了双机械臂与柔性硅胶夹爪。由于草莓极易被宽大的叶片遮挡,Q2的机械臂前端集成了动态视觉微型相机,能够像人类一样探入冠层深处进行“翻找”。在采摘的瞬间,闭环视觉系统会同步对果实的尺寸、表面缺陷、颜色成熟度进行毫秒级的质量分级,并将完好的草莓直接放入超市零售用的透明翻盖包装盒(Clamshells)中,省去了后续人工分拣的繁琐流程。在田间实测中,该设备实现了30公斤至50公斤/小时的高效产能(号称比人工快2-3倍),更难能可贵的是,其果实碰伤率被严格控制在4%左右,完全符合严苛的生鲜市场标准。在RaaS商业模式下,一名人类督导员可通过移动终端同时管理由八台Q2机器人组成的集群,极大地摊薄了用工成本7。
Tevel Aerobotics 与 HMC Farms(美国加州丘陵产区):在地形起伏较大、果树冠层较高的加州马里波萨县(Mariposa County)及中央谷地周边产区,传统笨重的地栖式机械臂难以触及树冠顶部的果实。知名农企HMC Farms选择与以色列Tevel Aerobotics深度合作,部署了革命性的“飞行自主机器人(Flying Autonomous Robots, FAR)”系统。该系统由一辆在果树行间缓慢行驶的移动地面基站和数架通过供电线缆与数据线相连的四旋翼无人机群组成。每架无人机都配备了独立的AI视觉芯片和一个长约3英尺(约90厘米)的抓取爪。由于彻底摆脱了机械臂的运动学死角和地形限制,这些灵巧的无人机能够从任意三维角度悬停并接近树冠各个方位的目标,成功且高效地完成了桃子、油桃、李子等大型核果类(Stone fruit)的无人化采摘试点。这种空地协同的立体作业模式,被业界视为解决山地果园采摘的最优解之一59。
Abundant Robotics(新西兰垂直果园):作为全球首批实现商业化苹果采摘的先驱,Abundant Robotics在新西兰霍克湾的T&G Global大型商业果园完成了史无前例的长周期实战部署。为了最大化机器人的作业效率,该果园进行了前置的农艺学改造,采用了间距3米的垂直冠层(Vertical Canopies)或V型格架(V-trellis)高密度种植模式。Abundant的采摘机器人外形类似于一台小型的果园联合收割机,其在夜间利用高亮度人造光源阵列抵消了自然光照的干扰,并通过一套独特的“真空吸力”末端执行器,以气动负压的方式将苹果从树枝上“吸”下,既避免了夹爪闭合时的机械硬损伤,又极大地提升了采摘节拍63。
PeK Automotive的Slopehelper(极端坡地应对):针对欧洲及亚洲地区极为陡峭的葡萄园与果园,PeK Automotive推出的Slopehelper纯电动全地形自主机器人展现了恐怖的底盘性能。该设备配备的超宽履带系统使其能够在高达45度(100%坡度)的致命斜坡上进行长时间的稳定作业。当配备其专属的苹果采摘铰接附件时,该平台能够在保证底盘绝不侧滑的前提下,以每4.5秒采摘一颗水果的极高频率进行半球形水果的规模化收获,其单台设备的产能相当于六名熟练采摘工人的总和64。
结论与未来展望
综上所述,2026年丘陵地带果园智能水果采摘机器人的研究与产业化进程,已经彻底跨越了单纯依靠视觉算法刷榜的实验室阶段,演进为一场深度融合了现代农机工程、材料科学、人工智能与集群调度运筹学的系统级技术革命。以YOLO11为代表的轻量化端到端感知模型与主动视觉、具身智能大模型的深度结合,赋予了机器人刺透复杂冠层遮挡的“火眼金睛”;自适应滑模控制(ASMC)与并联调平机构的引入,确保了履带式底盘在崎岖泥泞坡地中的如履平地;而变阻尼阻抗控制技术与仿生柔性末端执行器的完美配合,则在物理层面上终结了长期困扰业界的果实机械性损伤难题。
从长远的产业生态来看,尽管硬件制造成本依然高昂,但随着“机器人即服务(RaaS)”商业模式的全面铺开,以及多智能体集群协同调度算法(如HRRA)将车队作业效能提升超过45%,采摘机器人已在对抗日益恶化的农业劳动力危机中展现出坚不可摧的经济护城河。未来,随着农艺种植标准(如二维平面化树形修剪)与机器人硬件的进一步双向奔赴,一个由AI主导的、高效、无损且具备极高环境韧性的农业4.0时代,已然在广袤的丘陵果园中拉开帷幕。



欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐



 12
12 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)