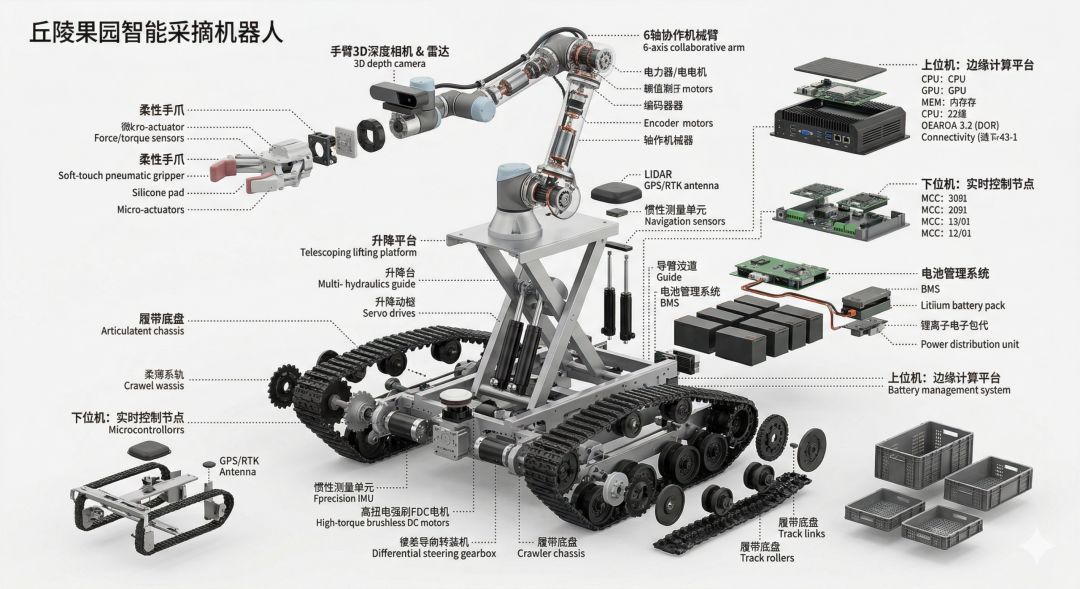
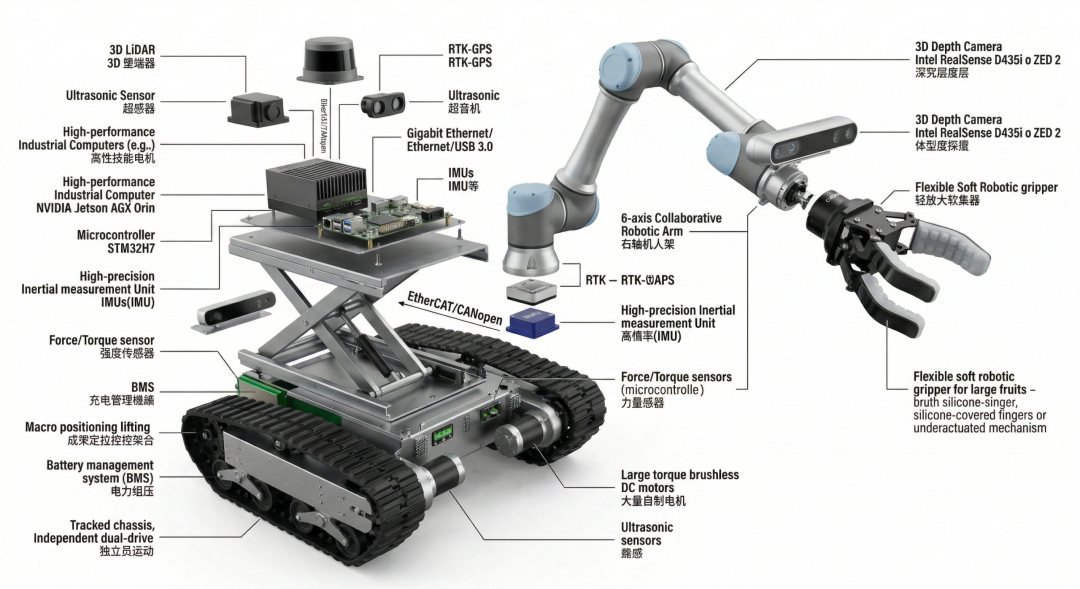
【Gemini】根据(丘陵果园智能采摘机器人)系统描述创建系统软硬件架构图 & 爆炸图 & 控制系统流程图
而是计算一堆苹果的平均高度,升降台一次到位后,依靠6轴机械臂的灵活工作空间,将该高度层的所有果实“一网打尽”。(黄色泳道)展示了独有的**“升降台(宏观Z轴)+ 6轴机械臂(微观6D位姿)”**的协同规划。主控线程只需要读取这个队列,解耦了“看”和“动”的时间差,极大提高了系统流畅度。机械臂的任务,瞬间降下升降台以降低重心,这是确保高价值机器人硬件安全的底线逻辑。,完美模拟了果农摘苹果的手法,避免
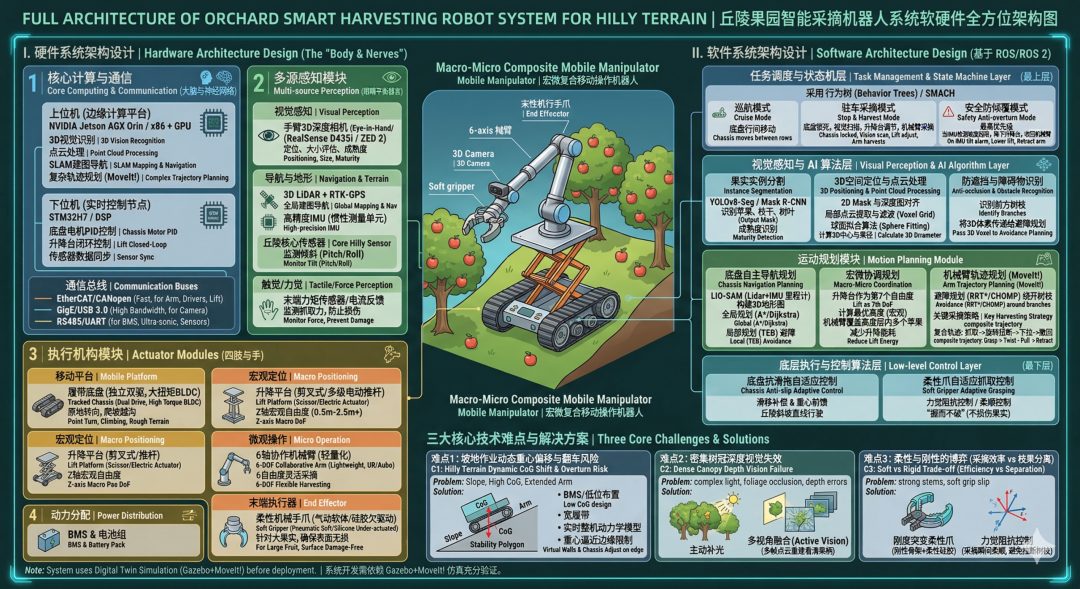


该控制系统架构采用了典型的ROS (Robot Operating System) 节点式设计思想,主要分为四个并发运行的核心线程:主控调度线程、底盘与安全线程、视觉感知线程、运动采摘线程。
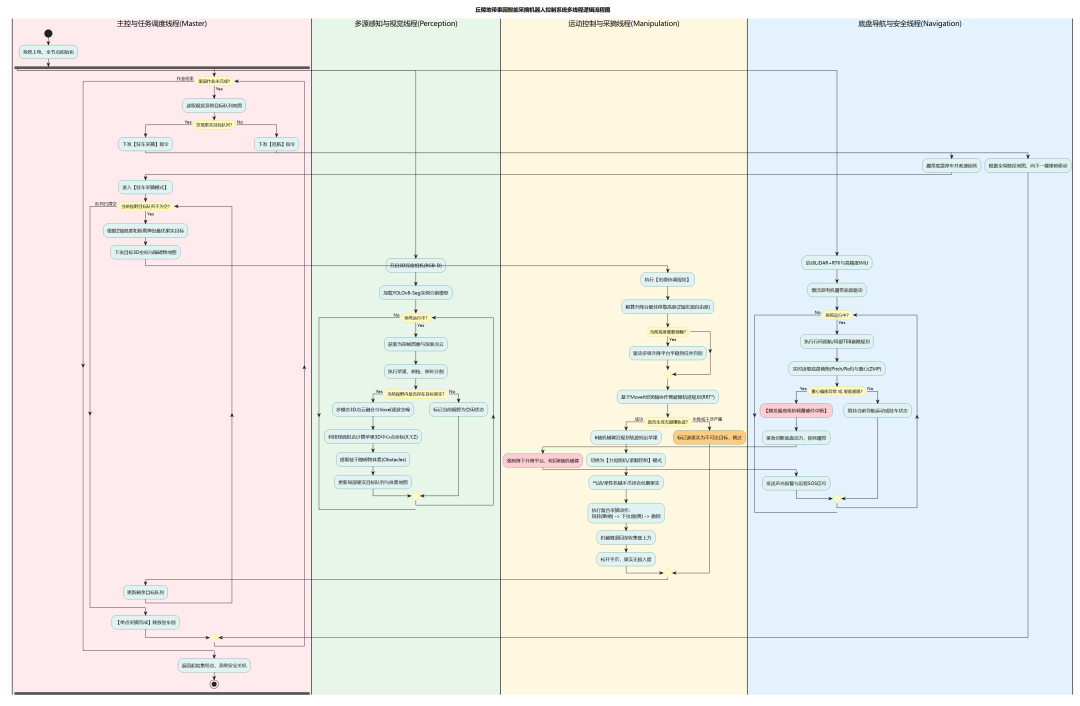
🧠 核心逻辑与多线程机制深度解析
在上述流程图中,控制系统的软硬件通过四个“泳道(Swimlanes)”进行协作,展示了复杂的并发逻辑与异常处理机制:
1. 异步感知与解耦调度 (Asynchronous Perception)
- 视觉感知线程
(绿色泳道)是一个完全独立的无限循环线程。它不会阻塞机械臂的运动和底盘的行走。
-
它像雷达一样不断扫描,一旦发现苹果并计算好3D坐标,就将其压入目标队列地图(Target Queue)。主控线程只需要读取这个队列,解耦了“看”和“动”的时间差,极大提高了系统流畅度。
2. 最高优先级的安全机制 (Anti-Rollover Safety)
- 底盘与安全线程
(蓝色泳道)具有系统的最高抢占权限(Preemptive Priority)。
- 丘陵地形的致命弱点是翻车
。在采摘时,升降平台升起导致重心极高,此时如果履带底端突然滑坡,后果不堪设想。因此该线程以高频(如100Hz)持续监控IMU。
-
一旦发现重心偏移(ZMP)异常或倾角超限(图中标红的判断节点),它会跨线程强行中断机械臂的任务,瞬间降下升降台以降低重心,这是确保高价值机器人硬件安全的底线逻辑。
3. 宏微协同与采摘博弈 (Macro-Micro Manipulation)
- 运动采摘线程
(黄色泳道)展示了独有的**“升降台(宏观Z轴)+ 6轴机械臂(微观6D位姿)”**的协同规划。
-
为了省电并减少车体晃动,系统不会摘一个苹果就动一次升降台。而是计算一堆苹果的平均高度,升降台一次到位后,依靠6轴机械臂的灵活工作空间,将该高度层的所有果实“一网打尽”。
-
在末端执行采摘动作时,流程图中特别定义了 “扭转 -> 下拉 -> 撤回” 的复合轨迹,结合力觉柔顺控制,完美模拟了果农摘苹果的手法,避免了柔性手爪拉扯导致大面积断枝断叶的问题。

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐



 12
12 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)