【Gemini深度研究】工业级智能3D相机研究进展与应用趋势深度解析报告
在全球制造业向高度柔性化、智能化跨越的宏观周期中,机器视觉系统正在经历一场从二维(2D)平面感知向三维(3D)空间认知的深刻范式转移。传统的2D视觉系统在处理颜色、形状和纹理等平面特征时具有极高的速度和成本效益,但在缺乏深度感知能力的情况下,其在应对低对比度表面、无序堆叠物体、复杂几何公差测量以及精密机器人引导时往往力不从心 1。这一物理局限性直接催生了工业级智能3D相机市场的爆发式增长。综合全球

产业宏观背景与全球市场格局演进
在全球制造业向高度柔性化、智能化跨越的宏观周期中,机器视觉系统正在经历一场从二维(2D)平面感知向三维(3D)空间认知的深刻范式转移。传统的2D视觉系统在处理颜色、形状和纹理等平面特征时具有极高的速度和成本效益,但在缺乏深度感知能力的情况下,其在应对低对比度表面、无序堆叠物体、复杂几何公差测量以及精密机器人引导时往往力不从心 1。这一物理局限性直接催生了工业级智能3D相机市场的爆发式增长。
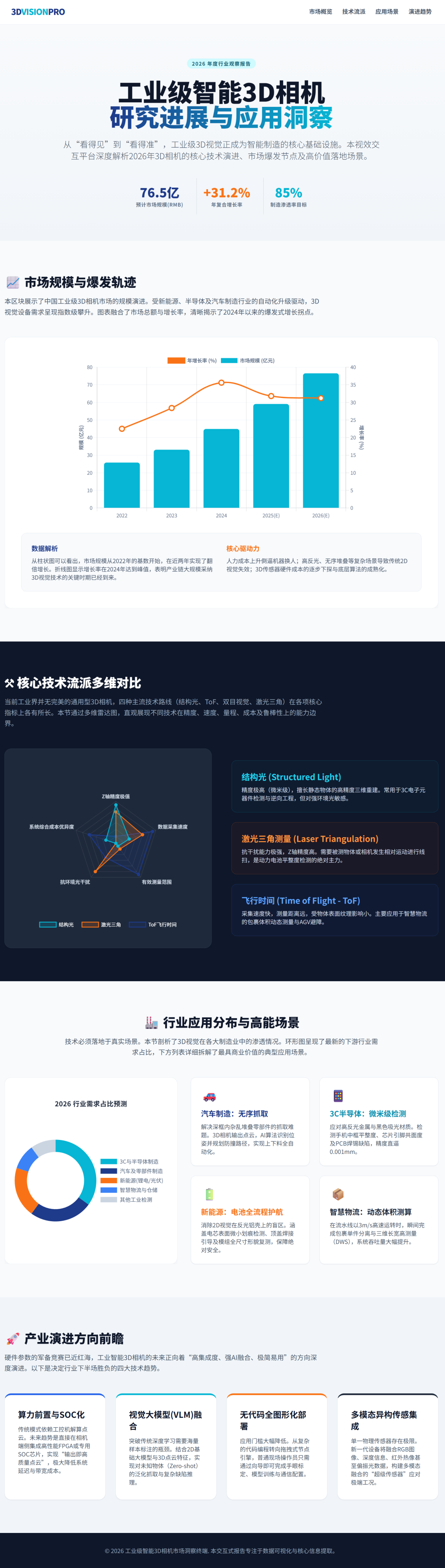
综合全球权威市场研究机构的数据分析,全球机器视觉系统的整体市场规模预计将从2024年的204亿美元攀升至2030年的417亿美元,复合年增长率(CAGR)高达13% 2。在这一庞大的基数中,3D机器视觉作为最具增长弹性的核心分支,其市场规模预计将从2025年的15.9亿美元(或50.4亿美元,因统计口径涵盖软硬件范畴不同而异)激增至2030年的34.9亿美元甚至2032年的105.6亿美元,其CAGR普遍被预测在11.5%至17.0%的区间内,远远超过整体机器视觉市场6.4%的平均个位数增速 3。
驱动这一强劲增长曲线的底层逻辑在于工业场景对极高良率和无人工干预自动化的绝对追求。在区域市场分布上,亚太地区凭借其在全球制造业供应链中的核心地位,预计在2025年将占据全球3D机器视觉市场40.7%的最大份额 6。中国提出的“中国制造2025”以及印度的“Make in India”等国家级宏观战略,正以前所未有的力度推动3D视觉系统在汽车制造、半导体先进封装、3C电子装配以及智能物流领域的规模化落地 5。与此同时,北美市场以其在人工智能(AI)、机器学习及航空航天领域的先发优势,侧重于高精尖医疗器械与自动化质检的研发应用;而欧洲市场(尤其是德国、英国、意大利)则在精密制造、严格的合规质量标准(如制药和高端汽车工业)的驱动下,构筑了极其成熟的3D视觉生态壁垒 7。
核心三维成像技术的底层物理机制与性能突破
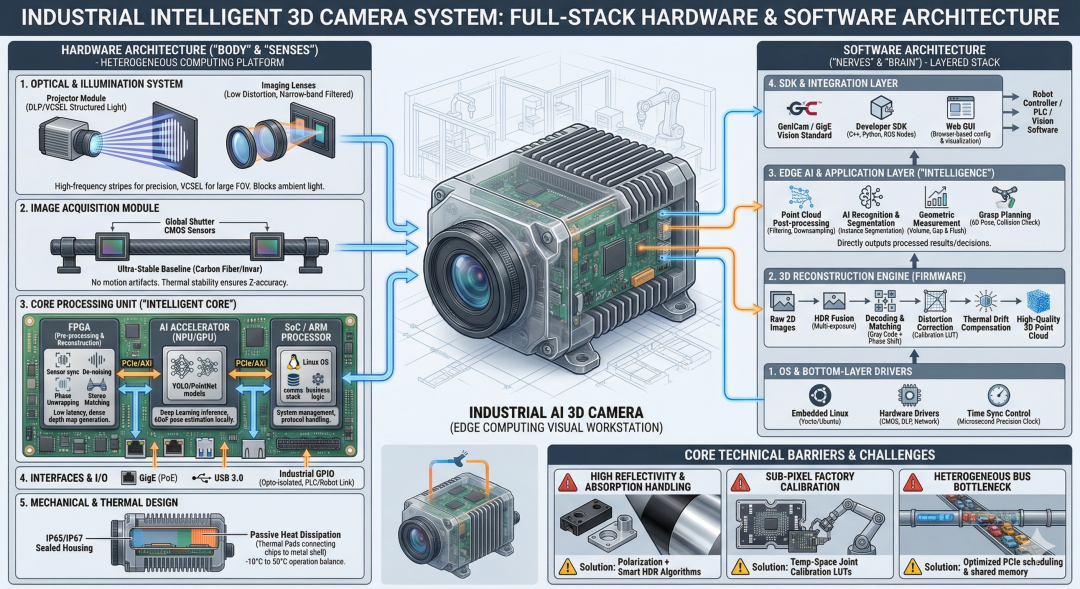
工业级3D相机的底层光学架构根据其获取深度(Z轴)信息的物理原理,主要划分为四大阵营:飞行时间(ToF)、结构光(Structured Light)、双目立体视觉(Stereo Vision)以及激光三角测量(Laser Triangulation)。在2024至2025年的技术迭代中,这些经典物理架构与现代半导体工艺及计算光学的深度融合,催生了性能指标的指数级跃升 3。
飞行时间(ToF)技术:从物流走向精密自动化的全天候感知
飞行时间(ToF)技术通过向目标场景发射调制光脉冲,并精确计算光波往返目标物体的时间差或相位差,从而生成高密度的深度图。2024年,ToF在各类3D图像检测技术中占据了最大的市场份额,并预计在未来五年内将以19.7%的惊人CAGR领跑所有细分技术领域 5。ToF技术的核心优势在于其卓越的实时性、极低的处理延迟以及对低光照环境的强适应性,这使其成为自主移动机器人(AMR)、自动驾驶辅助系统(ADAS)和高速物流分拣的黄金标准 5。
在最新的硬件突破中,工业级ToF相机已彻底摆脱了早期“低分辨率、易受环境光干扰”的刻板印象。例如,LUCID Vision Labs推出的Helios2系列3D ToF相机,不仅实现了亚毫米级的测量精度,还引入了高动态范围(HDR)和高速拍摄模式 9。针对复杂多变的工业现场照明,Helios2 Ray型号专门搭载了940nm波长的VCSEL(垂直腔面发射激光器)激光二极管,这种特定波长的红外光源能够有效避开太阳辐射的能量峰值,确保相机即使在直射阳光等极端户外环境下,依然能够输出无明显噪点和空洞的高保真3D点云数据 9。为满足不同场景的空间覆盖需求,厂商还通过光学设计提供了窄视角(31°×24°,用于高精度料框抓取)和宽视角(108°×78°,用于大面积物流包裹覆盖)的定制化选择 9。
结构光技术:逼近物理极限的亚微米级极致量测
结构光3D相机通过微型投影仪将预先设计好的复杂编码图案(如正弦光栅、伪随机散斑或二值化几何序列)投射到被测物体表面,工业相机同步捕捉这些图案随着物体表面几何形貌起伏而产生的畸变,最后通过严格标定的三角测量几何模型,精确逆向解算出场景中每一个像素的绝对三维坐标 3。该技术以其无与伦比的测量精度和极高的点云分辨率,牢牢占据着3C电子精密质检、逆向工程与高精度医学成像的顶端生态 11。
2025年的结构光技术演进呈现出两大核心特征:“蓝光激光化”与“超高频帧率”。在光源选择上,传统的白光或LED光源受限于光波的衍射极限,在扫描反光金属或强吸光材质时容易产生高光溢出或信号丢失。为此,业界顶尖厂商开始全面转向波长更短、能量更集中的蓝光激光技术。Photoneo公司发布的旗舰级PhoXi 3D Scanner Gen3便是一个典型代表,该设备搭载了510万像素的3D传感器,使得每一次扫描获得的点云数量较上一代跃升了60% 13。蓝光激光与高像素密度的结合,不仅显著提升了点云的保真度并降低了背景噪声,还赋予了设备在单次扫描中同时获取高精度3D几何形貌与800万像素全彩RGB纹理(通过内置的独立色彩相机)的能力,完美契合了现代机器人同时需要空间深度与色彩纹理进行复杂抓取规划的需求 14。
在扫描频率与分辨率的极限探索上,Next Vision Tech(翌视科技)发布的LVM3000系列结构光传感器标志着又一里程碑。通过硬件光路的折叠式创新设计,其不仅将传感器体积缩减了近一半以适应紧凑的产线空间,更将单轮廓点数从传统的4096点大幅提升至6500点 17。针对动力电池焊接等超高速检测场景,该系列的LVM3500型号通过10μm大像素设计与抗反射抑制技术,实现了高达6600Hz的极致帧率以及2500Hz的全景深度捕获能力;而专注于3C电子高端制造的LVM3700型号,则一举将测量精度推进至3μm至150μm的亚微米级深水区 17。此外,针对商用计量与逆向工程领域,Revopoint MetroX扫描仪通过融合多线蓝光激光与全画幅结构光,实现了0.01毫米的计量级精度,并利用NVIDIA GPU加速技术实现了高达60 FPS的实时处理速度 12。
双目立体视觉与混合架构:从被动感知到边缘AI驱动
传统双目立体视觉(Stereo Vision)的数学原理高度仿生人类视觉系统,通过两台(或多台)摄像机从不同视场角同时捕捉同一场景,利用极线几何与图像特征的视差(Disparity)来计算深度信息 8。根据相关研究,双目立体系统具有架构精简、能耗低廉的优势,且完全能够在环境光下工作,无需额外投射结构光图案,因此对强烈阳光或高反射表面的抗干扰能力较强(曾被NASA用于火星探路者任务的地形测绘) 11。然而,被动双目系统在遭遇弱光环境或扫描缺乏明显纹理的表面(如纯色抛光金属、白墙)时,特征匹配算法会瞬间失效;且由于需要在高分辨率图像间进行密集的像素级特征匹配,其对主机CPU的算力消耗极大 11。
为突破这一瓶颈,“主动双目+边缘计算(Edge AI)”的混合架构在2025年大放异彩。LIPSedge S315混合深度相机创新性地将传统的主动立体传感层与AI深度模型完美融合 18。在感知层获取几何基线数据后,相机内部集成的四核Arm Cortex-A55 CPU和高达4.5 TOPS算力的NPU接管了残差补偿、边界修复与时间稳定性滤波等高负载任务 18。这种边缘AI(Edge AI)推理架构彻底免除了对外接昂贵工业GPU的依赖,不仅大幅降低了系统的整体物料清单(BOM)成本和能耗,还将网络延迟压缩至极致。在处理玻璃、反光金属及深色材质时,其AI层能有效填补深度图空洞,使得该设备在机器人随机抓取(Bin-picking)和AGV/AMR的SLAM(同步定位与建图)导航中展现出卓越的工业级可用性 18。
激光三角测量(线激光/轮廓仪):超高速在线扫略的霸主
激光三角测量技术通常以上下料传送带上的高速运动物体为工作对象,相机与激光器以固定角度倾斜安装。线激光器向物体表面投射一条极细的激光线,相机阵列捕捉激光线的变形,随着物体在传送带上匀速通过,系统通过连续拼接上万条二维轮廓线,最终重构出致密的三维体积模型 8。
在需要100%在线质量控制(Inline Quality Control)的高速流转工业环境中,激光轮廓仪具有无可替代的地位。LMI Technologies旗下的Gocator系列产品在2024至2025年间实现了显著的性能跃升。新推出的Gocator 4000系列引入了同轴线共焦(Coaxial Line Confocal)技术,这是一种能够彻底消除遮挡阴影(Shadow-free)的先进光学架构,最高支持1920点/轮廓的分辨率以及精细至1.9微米的X轴分辨率,在半导体BGA封装和新能源汽车(EV)电池制造中大放异彩 21。此外,Gocator 2600系列搭载了900万像素的高分辨率成像器,每条轮廓包含高达4192个数据点,扫描与测量控制频率达到10kHz,测量范围高达1550mm 19。在木材加工等特殊工业领域,Gocator 2490通过多传感器组网(如5台相机环形或横向拼接),能够在120米/分钟的进料速度下,以800Hz的频率扫描一平方米的超大面积,并实现2.5mm的XYZ空间分辨率,展示了激光三角测量在宏观尺寸量测中的极致效能 22。
|
技术路线 |
核心物理原理 |
2025年关键硬件/算法突破 |
典型工业适用场景 |
局限性与前沿解决路径 |
|---|---|---|---|---|
| 飞行时间 (ToF) |
测量调制光脉冲往返目标的绝对时间/相位差 |
940nm VCSEL光源, HDR模式, 亚毫米级精度 |
动态物流分拣、托盘拆卸、AMR/AGV导航 |
易受多径效应干扰;通过多频调制与神经辐射场(NeRF)去噪缓解 5 |
| 结构光 |
投射编码光栅并解析由表面形貌造成的畸变 |
蓝光激光, 6600Hz超高频, 5.1MP分辨率, 亚微米精度 |
3C电子精密测量、反光金属件高精度无序抓取 |
易受强烈环境光干扰;通过高亮激光投射与底层抗反射抑制算法解决 14 |
| 立体视觉 (混合) |
视差计算模拟人类双目极线几何原理 |
主动散斑投射 + 边缘AI NPU(4.5 TOPS)深度模型补偿 |
高度柔性机器人引导、复杂光照下的粗质检 |
缺乏表面纹理时匹配失效;利用深度学习模型预测补全几何特征 11 |
| 激光三角测量 |
线激光扫描并利用严格标定的三角法计算轮廓 |
同轴线共焦技术(无阴影), 95kHz超高轮廓率, 9MP阵列 |
半导体BGA焊球检测、超高速卷筒材料检测 |
存在结构性遮挡阴影;通过多传感器同步组网与智能补全算法化解 21 |
数据传输协议的重构与异构计算架构的代际更迭
随着工业智能3D相机分辨率从传统的200万像素级向千万像素级迈进,单次扫描产生的三维点云、表面法线、二维高分辨率灰度图及全彩RGB纹理的数据量呈指数级爆炸。数据传输带宽和上位机的计算瓶颈,已成为制约整套机器视觉系统节拍时间(Cycle Time)的最大短板。
网络协议的革命:GigE Vision 3.0与RDMA技术的全面普及
传统的1GigE(千兆以太网)接口在面对海量高频点云数据时显得捉襟见肘,严重限制了相机硬件性能的发挥。2025年,由A3(美国推进自动化协会)主导的GigE Vision 3.0标准正式发布,彻底重塑了工业相机的网络传输架构 24。该标准最大的亮点在于全面引入了基于RoCEv2(RDMA over Converged Ethernet,聚合以太网上的远程直接内存访问)协议的高速流传输机制 25。
RDMA技术允许相机绕过主机操作系统内核以及TCP/IP协议栈的繁琐封装与中断处理,将庞大的图像与点云数据直接以“零拷贝(Zero-copy)”的方式写入主机PC的物理内存中 25。这一底层通信机制的革命带来了两大颠覆性优势:其一,传输带宽实现了跨越式增长。诸如Balluff最新推出的BVS CA-GW系列超紧凑工业相机,不仅搭载了Sony 2.7系列高达2460万像素的Pregius S传感器(如IMX901/902),更通过SFP28光纤收发器实现了25GigE的超高带宽传输,在100帧/秒的极限运行下功耗仅为12瓦 27。Baumer等领先厂商更是将产品线扩展至100GigE的恐怖带宽,使得单条网线能够支撑数百Gbps的大型多相机组网阵列 25。LUCID也顺势推出了支持10GigE和25GigE带宽且配备RDMA功能的Triton10与Atlas10系列相机,完美满足了对超低延迟敏感的工业需求 10。其二,主机的CPU负载断崖式下跌。在全速传输状态下,RDMA可将主机CPU占用率控制在3%以下,这释放了极其宝贵的计算资源,使其能够全负荷投入到复杂的AI推理、缺陷分类或多传感器融合运算中 25。
异构计算的深度分工:FPGA与GPU在点云处理中的博弈
在获取海量视觉数据后,处理端的硬件加速器(Hardware Accelerators)选择直接决定了系统的智能化水平与响应延迟。相关学术研究指出,在当前的高性能计算领域,现场可编程逻辑门阵列(FPGA)和图形处理器(GPU)正在根据其架构特性形成互补的深度分工 29。
FPGA凭借其高度并行的可重构硬件特性以及极低的确定性延迟,正被广泛下沉至智能3D相机的“传感器端(On-sensor)” 29。例如,AT Sensors推出的C7三角测量相机内部集成了独有的WARP技术,该技术直接在FPGA中对庞大的原始测量信息进行滤波、特征提取和数据预选,结合NBASE-T 5Gbps接口,成功将输出的可用3D轮廓频率推高至破纪录的95kHz,是传统传感器(最高约32kHz)的近三倍 23。在更为复杂的LiDAR点云语义分割任务中,科研人员开发的基于FPGA的实时处理系统实现了单帧38.5毫秒的超低延迟,其处理速度较传统方案提升了2.74倍,而能效比更是惊人地提升了46倍,极大地满足了无人机或工业AMR对功耗与实时性的双重苛刻要求 32。
与FPGA在底层数据流水线上的统治地位不同,GPU凭借其成千上万的处理核心和强大的浮点矩阵运算能力,在处理庞大的深度学习模型、神经网络训练以及复杂的3D特征匹配(如ICP算法)中依然是不可或缺的霸主 30。当前的一大趋势是将轻量级的AI处理模块(SoC)直接集成至智能相机内部,形成真正的“边缘AI相机”。例如,LUCID推出的Triton Smart相机内嵌了Sony IMX501智能视觉传感器,直接在传感器端执行AI推理,将复杂的点云分析压缩为简单的决策信号输出,进一步降低了数据带宽和延迟 9。
突破物理极限:算法驱动的精度飞跃与热稳定控制
在极其严苛的工业制造环境(如半导体量测、航空发动机叶片检测)中,单纯依赖光学镜头的分辨率升级不仅面临高昂的成本壁垒,更不可避免地会触及光学衍射极限的物理天花板。科研界与产业界正将目光转向通过极其复杂的数学算法,从现有的硬件提取出超越物理分辨率的量测数据。
亚像素边缘检测(Sub-pixel Edge Detection)技术的革命
传统的边缘检测算法(如Sobel、Prewitt、Canny算子)其精度受限于传感器的离散像素网格阵列,只能提供整数级的像素边界 34。然而在3C电子微小引脚测量、微齿轮检测或芯片裂纹分析中,一个像素的定位偏差往往等同于数微米的物理误差,直接导致良率误判 34。
2024至2025年的前沿图像处理算法通过构建复杂的强度过渡数学模型,实现了突破像素物理边界的“亚像素(Sub-pixel)”定位。例如,科研人员提出了一种名为CIS(Converted Intensity Summation,转换强度求和)的创新算法,该算法摒弃了传统将像素强度视为特定模型样本的拟合思路,创新性地将像素级强度解释为强度模型中的局部积分映射。结合SER(Stable Edge Region,稳定边缘区域)技术以消除边缘附近的局部噪声干扰,CIS算法在遥感、医学及工业PCB图像测试中不仅展现了超越现有最优算法(State-of-the-art)的定位精度,还大幅削减了算法的执行时间 36。此外,基于改进的墨西哥帽小波变换(Mexican Hat Wavelet Transform)结合Zernike矩的算法,在处理复杂三维角膜地形图或工业微曲面时展现出了强大的尺度适应性和鲁棒的抗噪能力,确保了即便是在低对比度或强噪声环境下,依然能获取极其平滑、连续且逼近真实几何形状的亚像素级轮廓 35。
极端环境下的热漂移(Thermal Drift)物理挑战与补偿机制
工业现场剧烈的温度波动会引起相机镜头、内部支撑结构及传感器平面的热胀冷缩,材料的热膨胀系数(CTE,例如钢材的CTE约为12μm/m°C)会导致光轴发生难以察觉的微小偏移,在精密量测中这种现象被称为"热漂移" 39。研究数据表明,在超高精度加工与机器视觉测量中,高达40%至70%的误差是由此类热效应引起的 40。
针对这一物理痛点,研究人员展开了软硬结合的多维攻坚。在物理硬件防护层面,波兰研究团队(Athermalized项目)利用先进的金属粉末3D打印技术,设计并制造了一种针对相机的特殊弹性悬挂装置,通过巧妙的机械拓扑结构自动吸收并隔离了外界温度变化带来的应力形变 41。在严苛的太空微重力增材制造(AM)模拟研究中,研究人员甚至探索了利用硅油在100°C环境下进行中性浮力浸没打印,以极致管控热调节和结构稳定性 42。
在无法完全消除物理形变的情况下,基于深度软件算法的热补偿模型成为了高端3D相机的杀手锏。Mech-Mind(梅卡曼德)最新的第四代Mech-Eye PRO相机通过底层硬件与算法的协同优化,成功将温度漂移降低了75% 43。在其为高端车企部署的在线测量系统中,自研的动态热漂移补偿模块能够实时监测环境温度梯度,并利用复杂的回归模型动态调整相机的校准矩阵参数,确保即便是车间温度大幅波
边缘AI与“眼脑协同”范式的深度融合
如果说高精度的3D光学传感器赋予了机器精准的“眼睛(Eye)”,那么深度学习与人工智能大模型的整合则赋予了机器处理混沌现实的“大脑(Brain)”。2025年,工业AI视觉系统正加速从基于严苛预设规则的逻辑推理,向具备高度自适应能力和泛化能力的认知智能跃迁 47。
破解反光与透明材质的“光学黑洞”
高反光金属、透明玻璃以及深色吸光材料一直是3D扫描领域的梦魇。反光表面会导致强烈的镜面反射,使相机传感器过曝致盲;透明材料会引发光线的折射;而吸光材料则会导致信号微弱,在深度图中产生大面积的“空洞(Void)”或产生严重误差的“海市蜃楼(Mirages)”假象 49。
前沿的科研与产品开发正通过多模态数据融合与物理光学创新来消灭这些死角。学术界最新设计了一种基于极化结构光(Polarization Structured Light)的3D传感器,通过引入高对比度光栅(HCG)VCSEL技术,创新性地将光波的偏振特性与深度信息提取深度融合,成功实现了对镜面、水面等极端反光表面的高精度3D几何重建,并大幅扩展了有效测量范围 49。在商用产品端,Zivid的Omni Engine技术引入了革命性的多模态数据对齐架构,使得相机能够在单次快门中输出像素级完美对齐的XYZ坐标、表面法线图、深度图以及2D图像,结合其对反光与透明包裹材料的特殊处理算法,使得AI软件能够获取毫无瑕疵的原始素材 50。此外,Next Vision Tech研发了专门针对半透明材质的表面轮廓提取算法与多材质HDR融合技术,确保了在高度复杂的光学表面依然能够稳定成像 17。
颠覆性的零代码AI训练与机器人无序抓取(Bin-picking)
传统的随机无序抓取系统极其僵化,往往需要事先导入高精度的CAD模型,且对工件的重叠和姿态极其敏感 50。融合了深度学习的新一代工业视觉系统彻底打破了这一桎梏。
以Solomon的3D视觉系统为例,该系统将立体视觉、ToF或结构光获取的空间数据与先进的深度学习模型深度绑定,使用户能在短短60秒内完成复杂异形件(如难以分辨方向的U型金属件)的AI识别模型训练。系统不仅能精准识别和定位,还能内建运动学规划模块,实时计算出避开料筐碰撞的最佳抓取角度与路径 51。Overview.ai推出的OV20i和OV80i系统更是将易用性推向了极致。利用Few-shot Learning(小样本学习)技术,工程师只需提供5张具有代表性的缺陷或工件样本图像,系统即可在1小时内完成训练。通过其每台相机内置的NVIDIA GPU进行纯边缘侧(Edge Processing)推理,彻底切断了对云端连接的依赖,既确保了企业生产数据的绝对安全,又实现了高达30 FPS的高帧率检测(能够精准捕捉视野内0.1%大小的微观缺陷),并支持EtherNet/IP、PROFINET等工业协议的无缝直连 52。
通过“高质量3D多模态数据”+“高效AI推理引擎”,如今的先进物流自动化方案(如Fizyr与Zivid合作的包裹分拣系统、西门子SIMATIC Robot Pick AI)无需任何先验的CAD模型,便能在不到300毫秒的极短时间内自主分析场景、分割重叠物体并输出最优的抓取位姿,成功将混合拆垛和随机抓取的成功率推升至99%以上,树立了工业自动化的新丰碑 50。
核心垂直领域的应用渗透与价值重构
随着性能和可靠性的大幅提升,工业级智能3D相机正加速渗透至对检测良率和自动化要求最为苛刻的核心制造领域。
半导体与3C电子组装:亚微米级检测的生死时速
伴随AI算力需求的大爆发和量子计算的推进,半导体产业正向更加复杂的3D先进封装(如台积电TSMC的CoWoS封装技术)和极紫外(EUV)光刻工艺迈进。预计到2026年底,CoWoS产能将激增至每月9万片晶圆,而随之而来的是极高概率产生的纳米级和亚微米级随机缺陷 54。传统耗时且昂贵的扫描电子显微镜(SEM)和原子力显微镜(AFM)已完全无法适应现代大规模产线的吞吐量要求 55。
智能物流与仓储质检:应对无限多样的包裹形态
物流行业的包裹在尺寸、材质(如透明薄膜、高光泽胶带)、颜色以及堆叠方式上呈现出无限的多样性。早期设备面对集装箱卸货时常常陷入崩溃。为了解决这一痛点,物流专用3D相机在视野(FOV)和采集速度上进行了疯狂堆料。Mech-Mind的Mech-Eye DEEP第四代相机专为大件物流拆垛设计,其在保证高精度的前提下,实现了3500 × 2800mm (@ 3.5m)的超大工作视野,扫描周期短至0.5秒,且在高达20,000 lx的工业强光下依然能获取色彩丰富的三维点云 64。
在算法层面,科研人员提出了一种基于RGB-D深度数据和深度学习(如YOLACT实例分割模型)的创新性包裹表面检测方法。该算法摒弃了容易被表面图案干扰的颜色特征,直接通过复杂的数学形态学运算提取三维深度的边界线。实验证明,对于随机尺寸和严重旋转遮挡的复杂包裹,该系统实现了高达93.8%和90.8%的mAP(50)检测精度,彻底解决了长期困扰物流行业的自动化卸车瓶颈 65。
重型汽车制造与柔性冲压:高环境抗性与系统级鲁棒性
汽车主机厂当前面临的最大挑战是适应多车型混线生产的需求。在车身冲压件的料筐上下料(Racking)环节,由于重型金属件在冲压与转运过程中极易造成料筐的物理形变,传统的盲目抓取极易引发昂贵的设备撞击。部署具有卓越工业级鲁棒性的Mech-Eye LSR XL-GL相机,系统不仅能通过实时测量特征距离自动识别超差的料筐变形并预警,其内置的抗光算法和高达100,000小时的平均无故障时间(MTBF)认证,极大降低了整车厂对产线调光设备和后期维护的资金投入 66。同时,对于细小精密零件(如车载雷达组件)的焊接与精细装配,手掌大小的Mech-Eye NANO ULTRA相机凭借其极紧凑的体积、自研DLP投影模块以及抵御60,000 lx环境光的逆天能力,展现了机械臂末端(Eye-in-hand)安装的极致灵活性 67。
行业标准化进程、软件生态构建与开源协作架构
在各类异构传感器(3D ToF、线激光、热红外、2D RGB)纷纷涌入智能制造产线的同时,各自为战的封闭系统与非标准数据格式严重阻碍了系统集成商的开发效率。2025年,围绕3D数据的接口标准化和底层开源框架的完善,构筑了机器视觉产业最核心的软件基础设施。
GenICam与GenDC:工业视觉底层通信语言的“大一统”
由欧洲机器视觉协会(EMVA)及全球其它G3组织(如A3、CMVU、JIIA等)共同维护的GenICam(相机的通用接口)标准,奠定了所有现代工业设备即插即用的基石 68。
在2025年中国海口举行的秋季国际视觉标准会议(IVSM)以及随后发布的技术路标中,工作组在标准化协议上取得了重大进展 28。除了发布包含GenApi 3.5版本及设备验证框架的GenICam 2025.10数据包外,工作组正全力推进SFNC(标准特征命名约定)2.8版本和GenDC(通用数据容器)1.2版本的落地 28。其中,GenDC协议具有划时代的意义,它提供了一个标准化的数据封装格式,能够将相机产生的1D(线扫描)、2D(多光谱图像)、3D(点云和深度图)以及元数据进行统一打包,彻底解决了多模态数据异构传输的难题 70。配合GigE Vision 3.0中的RoCEv2极速协议,这使得“软件定义相机(Software-Defined Camera)”成为现实。诸如Stemmer Imaging最新发布的CVB 15.0软件引擎,利用其革命性的GEV Server功能,能够无缝抓取多个分布式的传感器数据并进行底层融合,随后向主控系统输出符合GigE 3.0和GenDC规范的统一视频流。这种强大的分布处理能力使得复杂的立体视觉组网、机器人多角度环视以及跨模态的质检系统构建变得像搭积木一样简单 71。
开源3D处理引擎的繁荣:Open3D与O3DE的深度进化
在应用层算法开发方面,开源三维计算机视觉库极大地降低了前沿科研向工业化转化的壁垒。以Open3D(近期发布了v0.18至v0.19版本)为代表的开源库,在2024至2025年间实现了对大规模点云处理的极致优化 72。新版本深度强化了对现代GPU硬件的加速支持,并提供了涵盖3D几何处理、场景重建、点云配准(ICP)以及3D机器学习的全栈API支持 72。
在建筑信息模型(BIM)的自动化重构等复杂工业应用中,开发者依托Open3D及相关衍生库(如Cockroach、Cilantro),能够极高效地对海量逆向扫描点云进行自动化清洗、多平面分割与核心几何特征提取,彻底替代了传统依赖人工介入的极低效CAD建模流程 74。与此同时,由Open 3D Foundation(O3DF)主导的开源3D引擎O3DE(Open 3D Engine)在2025年的25.05.0大版本更新中,引入了成熟的多GPU渲染支持机制和大幅优化的移动端管线(性能提升达40%),进一步赋能了数字孪生(Digital Twin)、高保真工业仿真以及元宇宙机器人虚拟训练的快速落地 75。
战略结论与前沿技术演进展望
深度解构全球技术突破与市场应用趋势,工业级智能3D相机正在经历从单纯的光学测量工具向具备深度认知能力的基础自动化设施的蜕变。本报告基于以上极其详实的数据与技术脉络,提炼出以下三大未来演进的核心趋势与战略研判:
第一,感知维度的跃升:从静态3D空间向4D动态视觉(3D + Time/Velocity)跨越。 在追求极致生产节拍的工业4.0时代,静态的三维空间坐标系已无法满足高度动态环境下的极速决策。研究表明,在汽车ADAS辅助驾驶以及工业协作机器人领域,能够同时获取物体的三维空间位姿以及相对速度、运动矢量的4D视觉系统(如结合毫米波雷达的4D雷达,其市场渗透率预计在2030年将超过50%)正成为新的研发高地 76。在2025年举办的全球顶级计算机视觉顶会CVPR(该会议的论文接收率仅为22%,代表了AI领域的最高学术水平)上,“4D视觉:建模动态世界(Workshop on 4D Vision)”成为了备受瞩目的核心议题 77。在工业场景中,4D动态追踪将使得多台机械臂在高速穿梭中实现毫秒级的碰撞预测与协同作业,从根本上重塑产线的时间管理。
第二,硬件架构的重构:增材制造降本与多模态AI原生集成。 尽管3D相机的技术指标已臻至化境,但要在广大的中小制造企业中实现全面替代人工,极具竞争力的总体拥有成本(TCO)是决定性因素。科研人员正通过设计制造一体化(DFAM)原则,利用工业3D打印(增材制造)技术对相机的外部壳体和复杂机械支撑件进行拓扑优化与整合制造。通过大幅减少组件数量并实现轻量化,不仅优化了相机的散热通道以降低热漂移,更从根本上压缩了小批量定制化工业相机的制造成本和部署时间 80。同时,诸如Fraunhofer IIS(弗劳恩霍夫集成电路研究所)等顶尖研究机构在JPEG XS等近无损、超低延迟的图像编码协议上的研究,以及在微型卫星(如ERNST项目)上的高韧性传感器工程实践,正在为工业视觉系统带来更为极限的数据压缩和抗极端环境能力 84。未来,融合了高分辨率RGB、亚毫米级深度图以及热红外等信息的“多模态图像融合(预计2030年市场达12.3亿美元)”将与底层边缘AI芯片深度绑定,使得相机在出厂时即具备原生的小样本学习(Few-shot learning)和开箱即用的推理能力 88。
第三,开源生态与标准化壁垒的马太效应加剧。
在底层光电元件(如VCSEL发光组件、高像素CMOS传感器)性能日趋同质化的未来,企业间的竞争壁垒将不可逆转地向软件生态与系统集成能力转移。那些能够深度参与EMVA国际标准(如GigE Vision 3.0和GenDC)制定、并能依托Open3D等底层开源库迅速迭代出针对特定行业痛点(如半导体亚微米级测量补偿、物流透明包裹分割)的专有AI算法的企业,将在这场百亿美元级别的市场争夺战中获取非对称优势。
综上所述,工业级智能3D相机已全面进入物理极限突破与底层AI重构深度交织的全新纪元。伴随超高速网络传输、异构算力分工与亚像素级算法的日臻成熟,这一领域必将成为推动全球制造业实现全链路数字化孪生与无人化生产的最强劲引擎。

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐

 3
3 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)