上海AI实验室Point Track项目代码实战:从代码配置到核心模型架构全攻略
本文详细介绍了PointTrack项目的代码配置与运行流程。首先说明了环境配置步骤,包括克隆代码库、创建conda环境和安装依赖包。接着阐述了数据处理流程,包括数据集下载和预处理方法,并提供了CoTracker模块的离线使用方案。文章详细讲解了模型训练的两个阶段:TrackTransformer预训练和下游策略学习,同时对比了传统行为克隆(BC)的训练方式。
Point track项目源代码分析
我们这篇文章来分析分析Point track的源代码。这个项目的工程量可以说非常非常大。
(最终生成的视频截图,这里这个图是倒着的)

从官网拿到代码之后:Point Track ,按照要求配置好环境:
配置环境的方法:
git clone --recursive https://github.com/Large-Trajectory-Model/ATM.git
cd ATM/
conda env create -f environment.yml
conda activate atm
pip install -e third_party/robosuite/
pip install -e third_party/robomimic/
然后,处理数据。
mkdir data
python -m scripts.download_libero_datasets
当然,它这里的CoTracker是在现使用的(就是直接从hub上拿下来去使用的)。如果你的网络不好,你也可以将其换成离线的。
换成离线的方法:
1、需要自己手动下载CoTracker v2的代码。
2、把代码中的这个地方换掉(这里是在script/ preprocess_libero下):
# setup cotracker
# 获得cotracker,这是在线获取cotracker的方式
cotracker = torch.hub.load(os.path.join(os.path.expanduser("~"), ".cache/torch/hub/facebookresearch_co-tracker_main/"), "cotracker2", source="local")
# 切换到评估模式,dropout层不会再丢弃神经元,bn也使用预定义好的方差和均值
cotracker = cotracker.eval().cuda()
替换的方式其实很简单,就是CoTracker里面有一个CoTrackerPredict类,用那个构建出一个CoTracker,然后把这个给换掉就可以了。具体的可以参考我之前的一些文章。
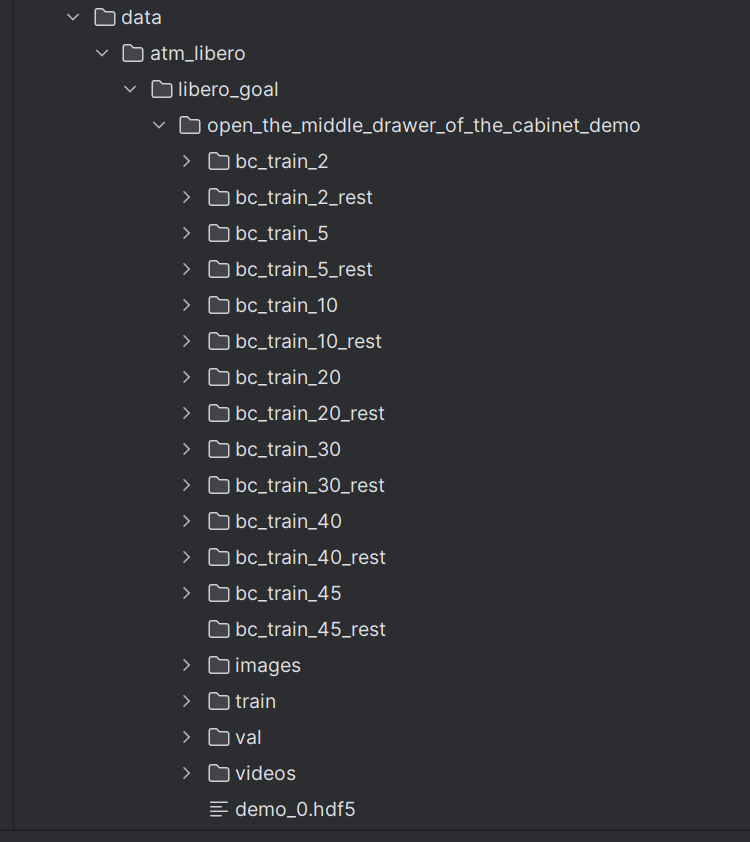
紧接着,数据处理好之后。需要再分割一下数据:
python -m scripts.split_libero_dataset
做完以后应该是这个样子的:
然后就到了跑第一个TrackTransformer了。这一步也比较简单,直接这样子就可以:
python -m scripts.train_libero_track_transformer --suite $SUITE_NAME
这里的 SUITE_NAME 可以是 libero_spatial, libero_object, libero_goal, 或者 libero_100
这里是预训练那个大的Track Transformer模型。
接着这里做完之后,就进行第二阶段的训练,可以理解为用该Track Transformer来去指导下游demo的学习。
训练方法:
python -m scripts.train_libero_policy_atm --suite $SUITE_NAME -tt $PATH_TO_TT
这里的--suite后面跟的参数仍然是 libero_spatial, libero_object, libero_goal, 或者 libero_100, 然后-tt就是track transformer的意思,它后面跟着的就是你第一阶段训练的Track Transformer模型的路径。
例如:
python -m scripts.train_libero_policy_atm --suite libero_spatial -tt results/track_transformer/libero_track_transformer_libero-spatial/
作者这里也同时提供了传统克隆(BC)的做法,也就是没有前面的Track Transformer生成的Track作为指导来去训练学习,直接通过模仿学习来完成的方式:
python -m scripts.train_libero_policy_bc --suite $SUITE_NAME
这里就不再需要后面的-tt参数,也就是不需要Track Transformer的参数了。
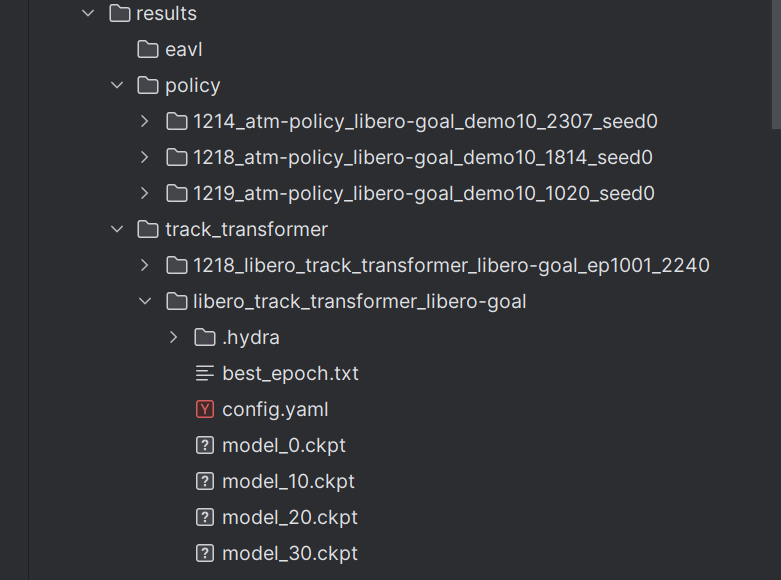
那么,这个就是一整个的训练过程。训练完你应该有这些东西:
评估过程,通过 scripts/eval_libero_policy来去实现。那具体的语法如下:
python -m scripts.eval_libero_policy --suite $SUITE_NAME --exp-dir $PATH_TO_EXP
例如:
python -m scripts.eval_libero_policy --suite libero_spatial --exp-dir results/policy/atm-policy_libero-spatial_demo10
OK。这样以后,就会在结果中生成在Libero仿真中的视频。
以上是关于代码运行的介绍。这是我运行了libero_goal的五个任务来去训练,然后在十个任务上进行测试的结果:

下面我们对代码本身来去进行简单的分析:
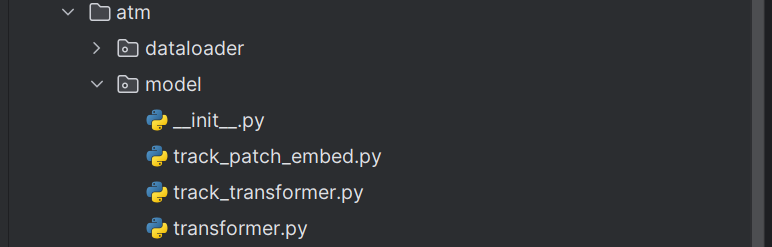
首先,模型最核心的部分(TrackTransformer),在目录atm/model/track_transformer.py中:
class TrackTransformer(nn.Module):
"""
flow video model using a BERT transformer
dim: int, dimension of the model
depth: int, number of layers
heads: int, number of heads
dim_head: int, dimension of each head
attn_dropout: float, dropout for attention layers
ff_dropout: float, dropout for feedforward layers
"""
def __init__(self,
transformer_cfg,
track_cfg,
vid_cfg,
language_encoder_cfg,
load_path=None):
super().__init__()
self.dim = dim = transformer_cfg.dim
self.transformer = self._init_transformer(**transformer_cfg)
self.track_proj_encoder, self.track_decoder = self._init_track_modules(**track_cfg, dim=dim)
self.img_proj_encoder, self.img_decoder = self._init_video_modules(**vid_cfg, dim=dim)
self.language_encoder = self._init_language_encoder(output_size=dim, **language_encoder_cfg)
self._init_weights(self.dim, self.num_img_patches)
def forward(self, vid, track, task_emb, p_img):
"""
track: (b, tl, n, 2), which means current time step t0 -> t0 + tl
vid: (b, t, c, h, w), which means the past time step t0 - t -> t0
task_emb, (b, emb_size)
"""
assert torch.max(vid) <=1.
B, T, _, _ = track.shape
patches = self._encode_video(vid, p_img) # (b, n_image, d)
enc_track = self._encode_track(track)
text_encoded = self.language_encoder(task_emb) # (b, c)
text_encoded = rearrange(text_encoded, 'b c -> b 1 c')
x = torch.cat([enc_track, patches, text_encoded], dim=1)
x = self.transformer(x)
rec_track, rec_patches = x[:, :self.num_track_patches], x[:, self.num_track_patches:-1]
rec_patches = self.img_decoder(rec_patches) # (b, n_image, 3 * t * patch_size ** 2)
rec_track = self.track_decoder(rec_track) # (b, (t n), 2 * patch_size)
num_track_h = self.num_track_ts // self.track_patch_size
rec_track = rearrange(rec_track, 'b (t n) (p c) -> b (t p) n c', p=self.track_patch_size, t=num_track_h)
return rec_track, rec_patches
那么,主要看它的self函数和forward函数,可以从这两个函数作为入口来去看。
那么关于维度的变化,都在上面的注释中解释过了。
通过这段代码可以简单地看到它是怎么样去做的。
首先是经过了编码,分别是_encode_video和_encode_track,然后,对文本也进行了编码。编码之后将三者cat在一起,丢进Transformer模型中。最后是取得rec_track和rec_patches两部分。即这里不仅计算了track,还计算了下一帧的frame。
这一点可以在下文的forward_loss中看到:

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐



 13
13 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)