AI应用分布式框架ray的设计细节和理念
Ray通过统一任务并行和Actor模型,构建了一个动态执行引擎,采用分层架构(应用层和系统层)和分布式全局控制存储(GCS)实现高效调度和容错。关键创新包括:分布式调度器避免单点瓶颈,内存对象存储减少数据移动,以及基于血缘的容错机制。
https://www.usenix.org/system/files/osdi18-moritz.pdf
Ray是一个专为应对新兴AI应用而设计的分布式框架。它旨在解决下一代AI应用带来的新挑战,尤其是在性能和灵活性方面。过去二十年,我们见证了大数据时代的到来,各种分析框架层出不穷。但AI的野心远不止于此。虽然监督学习取得了巨大成功,比如深度学习在图像识别、自然语言处理上的突破,但它们本质上是基于已知数据的模式匹配。真正的智能,需要机器能够像人一样,在不确定的环境中不断探索、试错、学习,这就是强化学习的核心思想。想想AlphaGo,它不是通过看无数棋谱学会下棋,而是通过与自己对弈,不断调整策略,最终超越人类顶尖高手。这种能力,让AI从被动分析走向主动决策,是迈向通用人工智能的关键一步。
强化学习的核心任务是什么?就是训练一个策略,这个策略能告诉智能体在特定状态下应该采取什么动作。这通常是一个迭代的过程:先评估当前策略,看看它在实际环境或模拟环境中表现如何,生成一系列状态、动作、奖励的轨迹;然后根据这些轨迹改进策略,让未来的决策更倾向于获得更高的奖励。这个过程需要三个关键能力:
- 一是仿真,用来快速评估策略并探索各种可能性;
- 二是分布式训练,利用大量计算资源加速策略优化;
- 三是服务,将训练好的策略部署到真实环境中进行实时决策。
这三个环节紧密相连,缺一不可。问题来了,现有的系统能搞定这些吗?答案是:很难。
- 传统的批处理框架,像Spark、MapReduce,擅长处理大规模静态数据,但对强化学习这种需要实时交互、动态调整的场景束手无策。
- 任务并行系统,比如Dask,虽然能处理动态任务,但在分布式训练和低延迟服务方面有所欠缺。
- 深度学习框架,如TensorFlow、PyTorch,虽然训练能力强大,但天然不支持仿真和嵌入式服务。
- 专门的服务系统,比如TensorFlow Serving,又只负责推理,不参与训练和仿真。
理论上,我们可以把它们拼起来用,但实际操作中,组件之间的数据传输和协调开销巨大,延迟高得离谱,根本无法满足强化学习对实时性的苛刻要求。所以,大家不得不为每个研究项目或者特定应用,从头开始搭建一套定制化的系统,这无疑增加了巨大的开发和维护成本。
Ray 的核心理念就是统一和灵活。它试图打造一个通用的平台,同时搞定仿真、训练和服务这三件事。怎么实现呢?关键在于它融合了两种计算模型:任务并行和Actor。
- 可以把任务想象成一个个独立的小工,比如运行一次仿真模拟,它做完就没了,轻装上阵,适合处理大量无状态的、细粒度的工作。
- Actor则更像是一个有记忆的工人,比如一个模型训练进程,它会持续存在,内部状态不断更新,适合处理长时间运行、需要维护状态的计算,比如参数服务器或者GPU上的迭代计算。
Ray 的巧妙之处在于,它用一套统一的引擎来管理这两种截然不同的计算方式,既保证了灵活性,又能实现高效的调度和容错。它需要处理每秒数百万个任务,而且延迟必须控制在毫秒级别,这对于实时决策至关重要。为了达到这个目标,Ray 做了两个关键设计:
- 采用了分布式调度器,而不是传统的单点调度器。这避免了调度瓶颈,让系统能够应对海量并发请求。
- 引入了一个全局控制存储,简称GCS,用来记录所有任务的血缘信息,也就是任务的依赖关系和执行历史。这个GCS本身也是分布式且容错的。
有了这两个设计,Ray 才能实现高吞吐量和低延迟。同时,它还提供了强大的容错能力:
- 对于任务和Actor,可以通过重放血缘信息来恢复;
- 对于GCS本身,则通过复制来保证数据安全。
Ray 的贡献主要体现在这几个方面:
- 构建了一个统一的框架,把训练、仿真、服务这三块核心拼图整合到了一起,解决了之前系统割裂的问题。
- 将 Actor 和 Task 这两种看似不同的计算模型统一在同一个动态执行引擎下,提供了前所未有的灵活性。
- 提出了一个核心的设计原则:将系统的控制状态集中存储在一个可扩展、容错的 GCS 中,而其他组件如调度器、对象存储保持无状态,这样极大地简化了系统设计,并为水平扩展和容错奠定了基础。
- 设计了一种自底向上的分布式调度策略,有效地平衡了负载,提高了整体吞吐量。
这张图展示了典型的强化学习系统。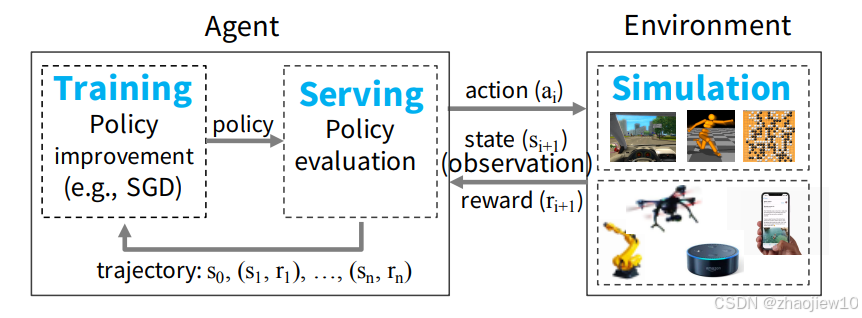
左边是智能体Agent,它不断地观察环境Environment的状态,做出动作,然后从环境中获得反馈,包括下一个状态和奖励。右边是环境,它可以是真实的物理世界,也可以是一个模拟器。智能体的目标就是学习一个策略Policy,这个策略决定了在给定状态下应该采取哪个动作,最终目的是最大化累积的奖励。这个过程就像一个永不停歇的试错循环,智能体不断与环境互动,积累经验,逐渐变得聪明。
Ray 提供了简洁的API来表达这两种计算模型。
| API | 描述 |
|---|---|
| futures = f.remote(args) | 远程执行函数 f,返回 Future 对象 |
| objects = ray.get(futures) | 获取与一个或多个 Future 对象关联的值,这是一个阻塞操作 |
| ready_futures = ray.wait(futures, k, timeout) | 返回已完成任务对应的 Future 对象,一旦达到 k 个任务完成或超时结束 |
| actor = Class.remote(args) | 将类 Class 实例化为远程代理,并返回其句柄 |
| futures = actor.method.remote(args) | 在远程代理上调用方法并返回一个或多个 Future 对象 |
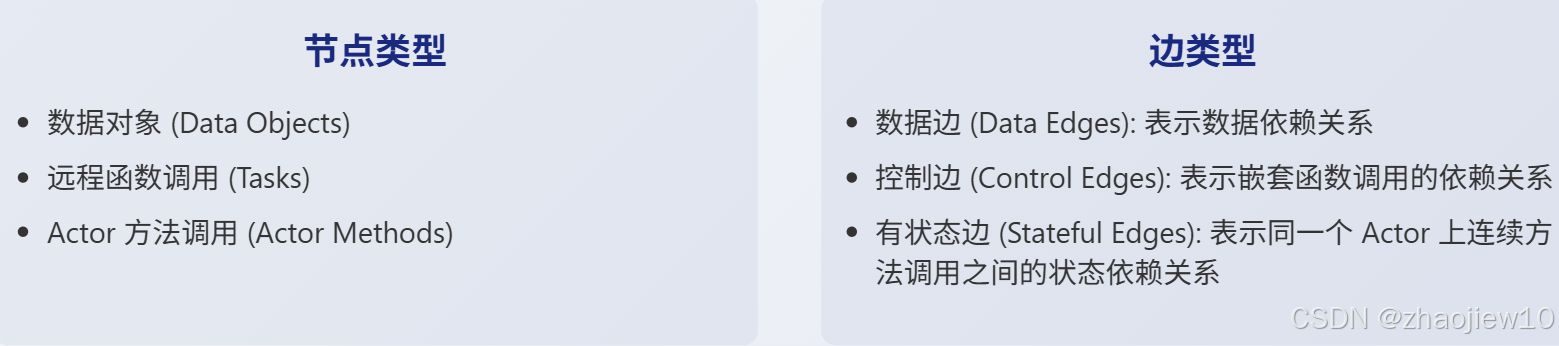
Ray 内部是如何管理这些任务和 Actor 的呢?它使用了一种叫做动态任务图的模型。你可以把整个应用程序想象成一张图,图中的节点代表数据对象、任务调用或者 Actor 方法调用。节点之间有边连接,表示依赖关系。数据边表示数据从哪里来,控制边表示任务之间的调用顺序,而有状态边则特别用于连接同一个 Actor 上连续的方法调用,因为这些方法共享 Actor 的内部状态。
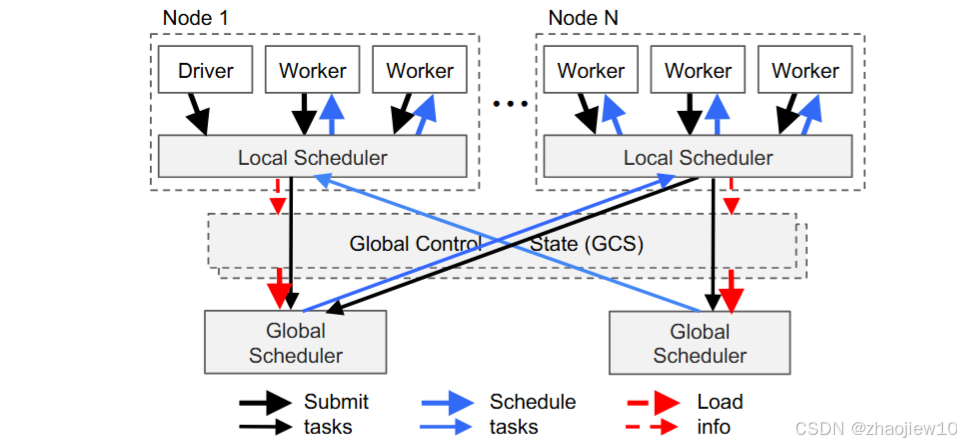
这种动态图模型非常灵活,能够很好地适应强化学习中不断变化的计算需求。Ray 的架构分为两层:应用层和系统层。
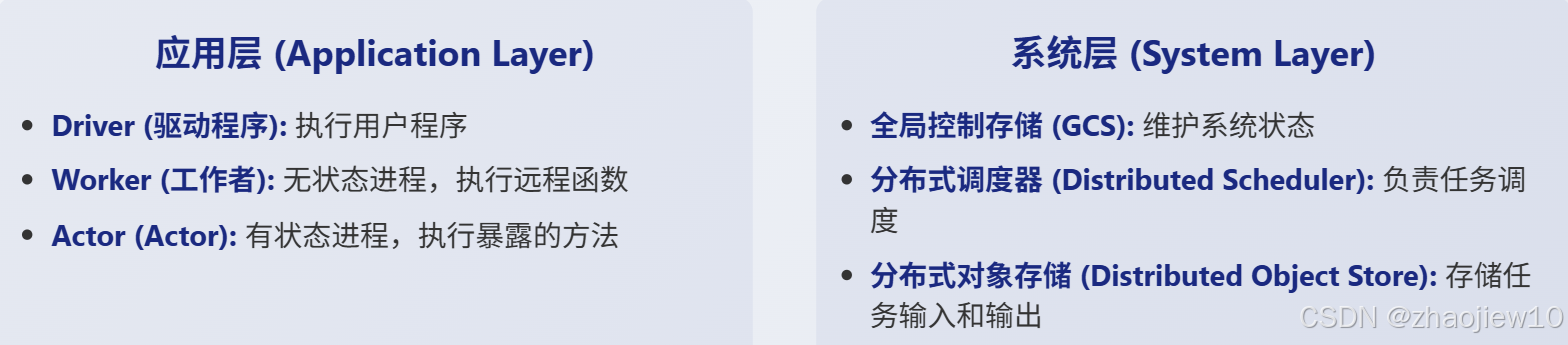
- 应用层是用户直接接触的部分,包括驱动程序Driver,它运行你的 Python 代码;工作者Worker,它们是执行无状态任务的进程;以及 Actor,它们是执行有状态方法的进程。
- 系统层则负责底层的支撑,包括我们前面提到的全局控制存储GCS、分布式调度器,以及分布式对象存储,用来存放任务的输入输出数据。
这个分层设计使得应用层专注于逻辑实现,而系统层则专注于性能和可靠性。
全局控制存储,简称GCS,是Ray架构中一个非常独特且关键的组件。
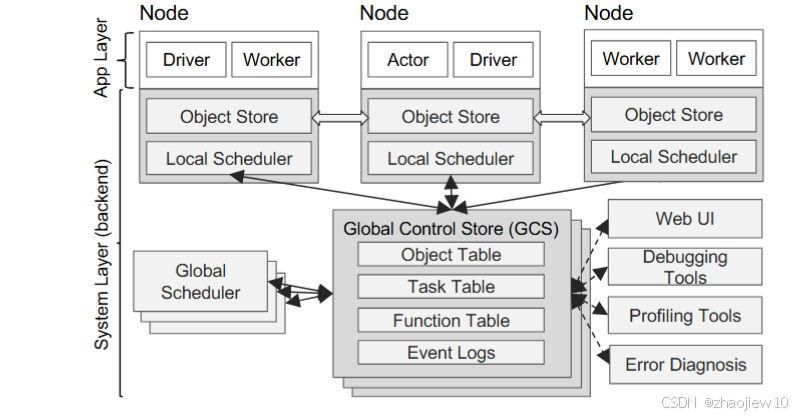
你可以把它想象成整个系统的中央大脑,但它不是单点的(注:这里的意思可能是说可以通过类似zookeeper的方式实现高可用)。它本质上是一个分布式、容错的键值存储,用来记录所有关于任务、Actor、数据对象的信息。为什么需要它?
- 存储了任务的血缘信息,这是实现容错的关键。当节点挂掉时,系统可以从GCS里读取历史信息,重新执行丢失的任务。
- 将元数据的存储和调度决策分离了。传统的系统往往把调度器和元数据存储放在一起,导致调度器成为性能瓶颈。
Ray通过GCS解耦,让调度器专注于快速决策,而GCS专注于稳定存储,这对于处理海量任务至关重要。这种设计使得所有组件都可以是无状态的,大大简化了容错和扩展。面对每秒数百万任务的调度压力,传统的集中式调度器根本扛不住。
Ray 采用了自底向上的分布式调度策略。
-
每个节点都有自己的本地调度器。当一个任务产生时,它首先交给本地调度器。本地调度器会先看看自己能不能搞定,比如有没有足够的资源,队列是不是太满了。如果能,就直接调度本地执行,效率最高。如果本地不行,比如需要GPU但本地没有,或者本地已经忙不过来了,它才会把任务上报给全局调度器。
-
全局调度器会综合考虑所有节点的负载情况和任务的资源需求,选择一个预计等待时间最短的节点来执行。
这种两级调度结构,既保证了局部的高效,又通过全局协调实现了整体的负载均衡。
为了让任务执行得更快,Ray 使用了一个内存中的分布式对象存储。这个存储器就像一个巨大的共享缓存,存放着所有任务的输入和输出数据。为了提高效率,它在每个节点上都使用了共享内存技术,这意味着同一个节点上的任务可以直接访问内存,无需拷贝,速度飞快。
数据格式采用了 Apache Arrow,这是一种高效的跨语言数据交换格式。如果任务的输入数据不在本地,对象存储会先把它复制过来,然后再执行任务。任务的结果也会写入本地对象存储。当然,内存是有限的,所以 Ray 使用了 LRU 策略,不常用的旧数据会被换到磁盘上。需要注意的是,目前的 Ray 对象存储只支持不可变数据,这简化了数据一致性和容错的处理。
我们来看一个简单的例子,加深理解。
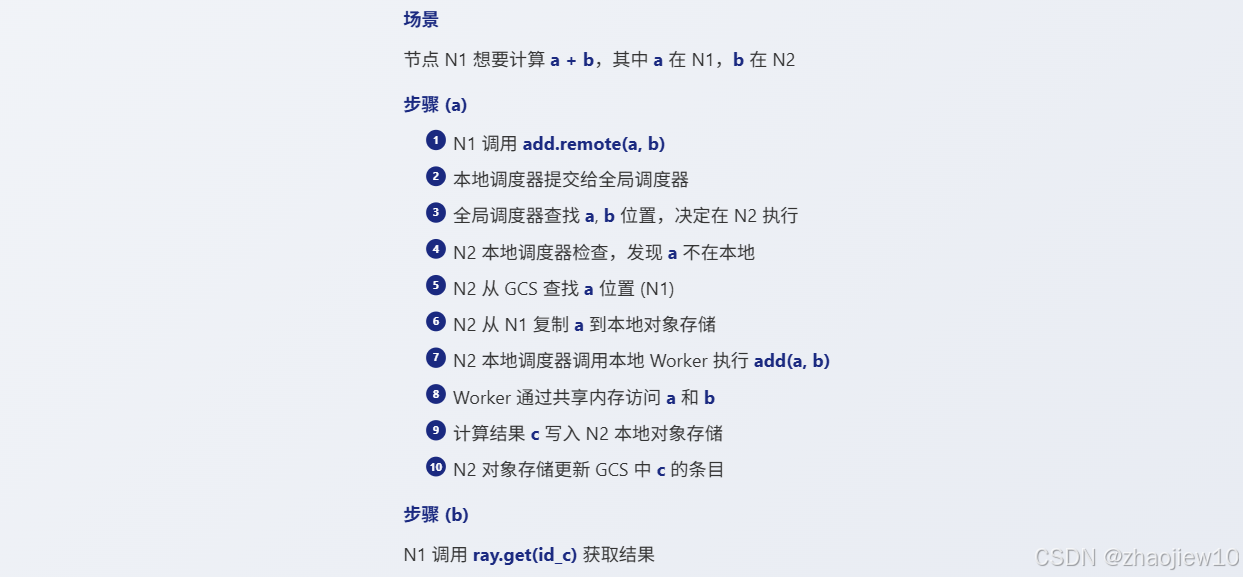
整个过程涉及数据移动和控制信号的传递,但大部分操作都在本地完成,效率很高。理论讲完了,我们来看看实际效果。
- 延迟。当任务输入数据量增大时,如果调度器不考虑数据在哪,延迟会急剧上升,甚至增加几个数量级。但Ray的调度器会尽量把任务调度到靠近数据的地方,所以即使输入很大,延迟也能保持在一个较低的水平。
- 可扩展性。随着节点数量的增加,每秒能处理的任务数量几乎是线性增长的。在60个节点上,吞吐量超过了一百万任务每秒,到了100个节点,更是达到了惊人的180万任务每秒。这证明了Ray的架构设计确实能够支撑大规模的并发计算。
除了调度,对象存储和GCS本身的性能也很关键
-
Ray的对象存储在处理大对象时,写入吞吐量可以超过15GB每秒,处理小对象时,IOPS也能达到18000以上,这得益于高效的内存管理和多线程复制。
-
GCS的容错能力。即使在模拟节点故障和重新加入的情况下,客户端感受到的读写延迟也基本保持在30毫秒以内,恢复速度很快。如果不进行刷新,GCS的内存会迅速耗尽,导致任务无法完成。而定期刷新,可以将内存占用控制在合理范围内,保证系统长时间稳定运行。
-
容错能力。当节点被移除时,系统会自动重建丢失的依赖关系,当节点恢复后,吞吐量也能迅速恢复。通过检查点机制,即使Actor所在的节点挂掉,只需要重执行少量最近的方法,就能快速恢复,而不是从头再来。
-
调度延迟。通过比较了Ray实现的Allreduce操作和OpenMPI的性能。令人惊讶的是,Ray的性能更好,尤其是在大数据量时。这得益于Ray的低延迟调度和对网络带宽的充分利用。
现在我们把目光聚焦到强化学习的具体构建模块上:
- 分布式训练。对比了Ray、Horovod和分布式TensorFlow在训练ResNet一百零一模型时的性能。Ray的表现非常出色,甚至在某些配置下超过了Horovod,这得益于Ray能够灵活地表达和优化训练过程中的数据流水线。接下来是服务。
- 比较了Ray Actor和Clipper在嵌入式服务场景下的吞吐量。由于Ray的低开销序列化和共享内存机制,它的吞吐量比Clipper高了一个数量级,这对于需要低延迟响应的RL应用至关重要。
- 仿真。Ray在处理大规模、异构的仿真任务时,能够更好地利用资源,达到更高的吞吐量。Ray不仅在性能上更胜一筹,而且使用的GPU数量更少,成本更低。这得益于Ray能够感知资源异构性,允许CPU和GPU任务混合调度,充分利用集群资源。相比之下,MPI通常需要对称架构,限制了灵活性和成本效益。
Ray 的工作并非凭空而来,它站在了很多前辈工作的肩膀上。
- 在动态任务图领域,CIEL 和 Dask 是 Ray 的重要参考。它们都支持动态任务图和嵌套任务,但 Ray 的独特之处在于它同时提供了 Actor 模型,并且采用了分布式、解耦的控制平面和调度器。这使得 Ray 在处理有状态计算和需要低延迟通信的场景时更具优势。
- 像 Spark、MapReduce 这样的数据流系统,虽然应用广泛,但它们的计算模型通常是静态的、批量同步的,难以适应强化学习中细粒度、动态的仿真需求。Naiad 等系统虽然有所改进,但仍然局限于静态任务图。Ray 的核心竞争力在于其动态性和灵活性。
- 在机器学习框架方面,TensorFlow 和 MXNet 是行业的标杆,它们在深度学习模型训练上表现出色。但它们的编程模型相对固定,不太适合需要动态调整计算图的强化学习场景。
- OpenMPI 提供了高性能的通信原语,但编程复杂,需要开发者自己处理很多细节。Ray 的优势在于提供了一个更通用、更易于使用的编程模型,同时又能通过底层的调度和执行引擎实现高性能。
- 在 Actor 系统方面,Orleans、Akka 等框架在构建高并发、高可用的分布式应用方面很有经验。但它们在容错方面,特别是对无状态计算的透明容错和精确一次语义的支持,不如 Ray 那么完善。Ray 的设计目标是让开发者能够更容易地编写健壮、高效的分布式 AI 应用。
Ray 从最初的一个 Spark 库发展到现在的独立框架,经历了漫长的探索。在 API 设计上,Ray 坚持简约主义,从最基础的任务抽象出发,逐步引入 wait 和 Actor。实践证明,这种看似底层的 API 非常强大且易于使用,很多先进的 RL 算法都能用几十行代码快速移植到 Ray 上。
当然,通用性也带来了一些局限性。比如,很难针对特定的 RL 算法进行极致的优化,因为调度器无法完全预知整个计算图的结构。另外,GCS 的存储成本也需要通过垃圾回收机制来管理。关于容错性,有人可能会问,AI 算法本身就有随机性,是不是可以忽略失败?我们的经验是,容错性非常重要。它不仅让编程更简单,还能极大地方便调试,尤其是在调试那些难以捉摸的 AI 算法时,确定性重放非常有用。而且,使用 Spot 实例等廉价资源时,容错更是必不可少。虽然有开销,但 Ray 发现对于目标工作负载来说,这个开销是可以接受的。
GCS 的作用远不止于容错。它极大地简化了 Ray 的开发和调试过程。开发者可以方便地查询整个系统的状态,而不需要像以前那样手动去暴露各个组件的内部信息。我们的时间线可视化工具也是基于 GCS 构建的。更重要的是,GCS 的分片和副本机制是 Ray 实现水平扩展的关键。当 GCS 或调度器成为瓶颈时,我们可以通过增加分片或副本的数量来轻松解决。这让我们相信,将控制状态逻辑化、集中化管理,将是未来分布式系统设计的一个重要趋势。

欢迎加入DeepSeek 技术社区。在这里,你可以找到志同道合的朋友,共同探索AI技术的奥秘。
更多推荐



 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)